Patent application title: Cooking Appliance, Especially Top-Mounted Cooking Appliance, and Method for Controlling a Cooking Appliance
Inventors:
Ingo Bally (Traunstein, DE)
Alexander Dinkel (Unterwoessen, DE)
Kerstin Feldmann (Bretten, DE)
Wolfgang Fuchs (Altenmarkt A.d Alz, DE)
Martin Keller (Traunreut, DE)
Angelika Namberger (Altenmarkt A.d. Alz, DE)
Maximilian Neuhauser (Chieming/egerer, DE)
Klemens Roch (Trostberg, DE)
Wolfgang Schnell (Trostberg, DE)
Guenter Zschau (Traunwalchen, DE)
Assignees:
BSH BOSCH UND SIEMENS HAUSGERAETE GMBH
IPC8 Class: AF24C1502FI
USPC Class:
126 1 R
Class name: Stoves and furnaces stoves cooking
Publication date: 2008-12-25
Patent application number: 20080314374
Inventors list |
Agents list |
Assignees list |
List by place |
Classification tree browser |
Top 100 Inventors |
Top 100 Agents |
Top 100 Assignees |
Usenet FAQ Index |
Documents |
Other FAQs |
Patent application title: Cooking Appliance, Especially Top-Mounted Cooking Appliance, and Method for Controlling a Cooking Appliance
Inventors:
Wolfgang Schnell
Ingo Bally
Kerstin Feldmann
Wolfgang Fuchs
Martin Keller
Maximilian Neuhauser
Klemens Roch
Alexander Dinkel
Angelika Namberger
Guenter Zschau
Agents:
BSH HOME APPLIANCES CORPORATION;INTELLECTUAL PROPERTY DEPARTMENT
Assignees:
BSH BOSCH UND SIEMENS HAUSGERAETE GMBH
Origin: NEW BERN, NC US
IPC8 Class: AF24C1502FI
USPC Class:
126 1 R
Abstract:
A cooking appliance, especially a top-mounted cooking appliance including
a muffle that defines a cooking space and is provided with a muffle
access opening; a door pivotably mounted to the muffle for movement into
and our of a covering relation with the access opening; a driving device
in operative engagement with the door; a control device operatively
associate with the driving device for controlling door movement; and an
arrangement for determining a door displacement parameter during door
movement, wherein a determined door displacement parameter is used as a
reference parameter for a function of the appliance.Claims:
1-12. (canceled)
13. A cooking appliance, especially a top-mounted cooking appliance, comprising:a muffle that defines a cooking space and is formed with a muffle access opening;a door pivotably mounted to the muffle for movement into and out of a covering relation with the access opening;a driving device in operative engagement with the door;a control device operatively associated with the driving device for controlling door movement; andmeans for determining a door displacement parameter during door movement wherein a determined door displacement parameter is used as a reference parameter for a function of the appliance.
14. The cooking appliance according to claim 13 and further comprising means for using the reference parameter to generate a trigger signal in the control device to initiate action by the driving device with respect to door movement.
15. The method according to claim 13 and further comprising means for using the reference parameter as a criterion in subsequent displacement movements of the door.
16. The cooking appliance according to claim 13 and further comprising means for determining a reference speed of door movement from a displacement speed, wherein the reference speed is defined as the reference parameter.
17. The cooking appliance according to claim 16 wherein the reference parameter is determined after a substantially constant displacement speed has been reached by the door.
18. The cooking appliance according to claim 16 wherein the reference parameter is determined after a substantially constant door acceleration has been reached.
19. The cooking appliance according to claim 13 wherein the determination of the reference parameter is defined over an entire door displacement path.
20. The cooking appliance according to claim 13 wherein a jammed state is defined dependent upon the determined reference parameter.
21. A method for operating a cooking appliance, especially a top-mounted cooking appliance, comprising the steps of:providing a cooking appliance having a muffle that defines a cooking space and is provided with a muffle access opening; a door pivotably mounted to the muffle for movement into and out of a covering relation with the access opening;a driving device in operative engagement with the door;providing a control device operatively associated with the driving device for controlling door movement;providing means for determining a door displacement parameter during door movement operatively associated with the control device;determining a parameter dependant on door displacement the determination occurring during door displacement; andusing the determined parameter as a reference parameter for a function of the appliance, in particular an anti-jamming function.
22. The method according to claim 21 wherein the step of determining the reference parameter includes holding at least one switch closed, the switch being operatively associated with the door.
23. The method according to claim 22 and further comprising the step of aborting the determination step upon early release of the at least one switch.
24. The method according to claim 22 wherein in the determination step, the at least one switch is opened prior to determining the reference value and automatic operation on the basis of the reference parameter is not permitted, in particular no displacement operation of the door is possible.
Description:
[0001]The invention relates to a cooking appliance, particularly a
top-mounted cooking appliance, comprising at least a muffle that delimits
a cooking space, and is provided with a muffle hole, a door for closing
the muffle hole and a driving device which is controlled by a control
device and is used for displacing the door.
[0002]A top-mounted cooking appliance is known from DE 102 28 140 A1 in which the jamming of objects by the bottom door may be detected by a plurality of anti-jamming switches that may be actuated independently of one another and are located between the bottom door and the muffle frame. In addition, any pressure increase may be evaluated in a door seal with a hollow cross-section.
[0003]In DE 101 64 239 A1, an anti-jamming mechanism is described which is triggered by varying tensile forces on the traction cables driving the bottom door. A torque sensor is also described, which registers a load moment on the drive shaft of an electric motor. Tensile force sensors, piezoelectric sensors and deformation or tension/expansion sensors are listed as sensors for this purpose.
[0004]DE 102 88 141 A1 also describes an optoelectronic sensor for detecting a jam, which is activated by the quantity of reflected light.
[0005]The disadvantage of the described jam detectors is that they are either relatively slow (tensile force sensors), or imprecise and prone to error (optical force sensors) and, furthermore, require increased installation costs.
[0006]The main disadvantage is that the function for detecting a jammed object does not work reliably, if at all, if there is a variation in the internal parameters of the cooking appliance itself or in external factors. For example, a heavy load on the door may mean that a preset displacement speed cannot be achieved, or can only be achieved after a delay. Furthermore, using the cooking appliance in an area where the voltage fluctuates between too high and too low may result in short-term deviations. Finally, the effects of aging on the drive for the door or on guide rails may mean that an originally preset displacement speed can no longer be reached.
[0007]Another disadvantage is a triggering of a closing process for the door, in which--shortly before the closed state is reached--there is a changeover from an anti-jamming mechanism in which a switch or a function is used for detecting a jammed state, to a closing mechanism for registering a closed state.
[0008]The object of the invention is, therefore, to provide rapid, simple and precise adjustment of the cooking appliance to variable operating conditions, and--preferably--a displacement speed detector for a cooking appliance of the type described above.
[0009]This object is achieved by the cooking appliance having the features described in claim 1 and by a method according to claim 9.
[0010]Thus a cooking appliance is preferred, particularly a top-mounted cooking appliance, comprising at least a muffle that delimits a cooking space, and is provided with a muffle hole, a door for closing the muffle hole and a driving device which is controlled by a control device and is used for displacing the door, wherein--during a displacement of the door--a parameter that is dependent upon said displacement of the door is detected and wherein the detected parameter is used as the reference parameter for a function of the appliance.
[0011]In this way the cooking appliance and its functionalities may be advantageously adjusted to local or current operating conditions. This would enable environmental influences, as well as a non-standard operating voltage or a varying load on the door, to be taken into account as external operating conditions. Internal operating conditions that may be taken into account include, for example, effects of aging of the cooking appliance itself, for example an aging drive motor or wear on guide rails for displacement of the door, so that even gradual changes such as the effects of friction may be taken into account.
[0012]The reference parameter is thus advantageously always approximated as closely as possible to an actual target value. As well as a speed-dependent reference parameter being taken into account, the latter may also be determined on the basis of other variable factors such as a motor current.
[0013]The reference parameter may subsequently be used as a criterion for the triggering of a function in the same displacement movement of the door. This advantageously enables a respective adjustment in particular of the displacement speed and--for example--of an anti-jamming mechanism, so that, for example, a varying load on the door may be taken into account individually for the respective displacement cycle.
[0014]The reference parameter may also subsequently be used as a criterion in subsequent displacement movements of the door. The settings for basic parameters or for basic parameter ranges can thereby advantageously be defined when the cooking appliance is commissioned for the first time, or at periodic intervals during maintenance activities. In addition to the initial memorization of functions, this also enables the parameters thus defined to be adjusted from time to time so that even gradual changes, for example elevation speed, can be taken into account on the basis of changing frictional conditions.
[0015]A reference speed determined from a displacement speed may be defined as the reference parameter. The reference parameter is preferably determined for this purpose after a constant displacement speed has been reached. This enables the parameter to be determined reliably during an initial acceleration phase without load-dependent acceleration effects. The reference parameter may also be determined, however, after a constant acceleration has been achieved. This enables the parameter to be set at particularly early stage, so that it may be used particularly advantageously for the current displacement movement.
[0016]The determination of the reference parameter is alternatively defined over the entire displacement path or part thereof, e.g. it is initially determined and then subsequently adjusted to favorable effect. Such an approach offers the advantage of, for example, enabling frictional effects from lifting rails and similar to be detected especially accurately and to be taken into account.
[0017]A jammed state may therefore advantageously be determined dependent upon the defined reference parameter. This ensures the correct functioning of safety-related functions, such as the detection of a jammed state even in variable environmental conditions, for example where the operating voltage is too high or too low, resulting in fluctuations in displacement speed.
[0018]The reference parameter is determined preferably by keeping a button pressed down, or--in particular--two buttons (e.g. displacement buttons) to be operated with both hands. If the buttons are released early, the process to determine the reference parameter is preferably aborted. Such a procedure is useful since, if the process is aborted early due to the release of the displacement buttons or other buttons, this prevents a reference parameter value being determined on the basis of an erroneous displacement process. Automatic operation on the basis of the parameter or reference parameter to be determined, e.g. an automatic displacement operation, is then conveniently not possible.
[0019]For this purpose, the cooking appliance--which is, in particular, a top-mounted cooking appliance but may also be a cooking appliance with an oven carriage--is equipped with a speed measurement device for determining a displacement speed of the door. The speed measurement device enables an object jammed by the door to be detected by monitoring of the displacement speed, wherein the displacement movement does not need to be speed-controlled, but may--for example--also be governed on a load-dependent basis via the motor voltage or motor current. The displacement movement of the door is, however, advantageously also controlled on a speed-dependent--and therefore also load-dependent--basis, e.g. via a central control unit.
[0020]It is particularly advantageous, for the closure case, if at least one end switch is available in addition, said end switch being disposed between muffle hole and/or frame, and door, wherein any activation of at least one end switch deactivates the anti-jamming device or a first type of anti-jamming mechanism, and thus terminates protective measures. This end switch preferably activates with an degree of opening of less than one centimeter, in particular in a range of 4-9 mm, which is so small that no normal household objects could become jammed. If at least one end switch is activated the door is pushed with defined force--and no longer with controlled speed--onto the muffle hole. Nevertheless, it is advantageously guaranteed that the door is not unintentionally reversed on closing, but can still be reversed if an object should become jammed in the final phase of closing.
[0021]In particular, the non-abrupt, premature stopping of the closure movement would indicate that a child's finger has become jammed, in which case the door is immediately opened again, particularly to a degree sufficient to allow the finger to be withdrawn. Such non-abrupt, premature stopping of the closure movement may be detected with particular reliability by the monitoring of a speed differential value.
[0022]However, in order to prevent even smaller objects, or--in particular--a child's finger, from becoming jammed, it is preferable for a switchover to a modified safety feature to be provided instead of complete deactivation.
[0023]The advantage of this speed-supported anti-jamming device is that is responds relatively quickly, can hold accurate input date, and may be implemented relatively easily without major design measures.
[0024]The monitoring of the displacement speed can be focused on a reduction in the displacement speed, which is uncontrolled and therefore cannot be deliberately regulated. This may occur in that a value measured by the speed measurement device deviates from a target value by a fixed or percentage value. If the deviation is above or below a defined threshold value, a jam is assumed to have occurred. For example, if the door can no longer be displaced with the set target speed because an object is preventing it from doing so, then its speed is reduced accordingly. This evaluation and monitoring may be carried out--for example--in a central control device, e.g. via suitable microcontrollers.
[0025]Alternatively, or additionally, a timing-related change in the displacement speed--especially too rapid a change--may trigger a jam situation, if--for example--the door slows down more quickly than provided for, in the event of a jam.
[0026]The values are, of course, selected such that jam situations are not triggered by speed fluctuations caused by the normal process for the displacement of the door. In addition, the anti-jamming methods described in the prior art, such as motor current measurement, may also be used.
[0027]It is advantageous for the speed measurement device to comprise at least one sensor on a motor shaft of the drive mechanism, in particular a drive motor, by which corresponding sensor signals can be generated upon rotation of said motor shaft. This facilitates a relatively rapid response. The sensor signals are directly or indirectly a measure of the displacement speed of the door. It is then particularly beneficial if at least one sensor is a Hall sensor which emits two sensor signals per motor shaft rotation. The Hall sensor system is easy to install, fast and non-sensitive. Two (partial) Hall elements are advantageously attached to the motor shaft, so that two signals are emitted for each rotation of the motor shaft. Evaluation of the timing of these signals enables a speed to be determined for the bottom door, for example via comparison tables or by conversion to real time. The displacement speed is preferably detected by a time differential between the sensor signals.
[0028]In order to determine a stable speed it is advantageous for several, i.e. more than two, sensor signals to be evaluated. To this end it is also advantageous if several, i.e. more than two, sensor signals, are emitted.
[0029]It is particularly advantageous if the displacement direction of the door is reversed once the jam has been detected.
[0030]For this purpose an anti-jamming device may be provided which monitors for jam situations and/or implements any measures to be carried out in the event of a jam. The anti-jamming device may be a separate device or functionally integrated into existing control circuits, e.g. into the central control circuit or into a control board or lift board.
[0031]It is preferable for the anti-jamming system or the anti-jamming device to be activatable only if a target displacement value, in particular a target speed, is reached by the door. This minimizes the risk of the anti-jamming mechanism being triggered incorrectly.
[0032]In order to protect the object jammed by the door, it is advantageous if a maximum force-time curve is not exceeded by the door. Jammed "by" the door may mean jammed between the door and an outer limit, e.g. the work surface, or jammed between door and muffle frame or housing. Different force-time curves may be provided for each case.
[0033]It is particularly advantageous, for the closure case, if at least one end switch is available in addition, which is disposed in the area between muffle hole or frame and door, wherein any activation of at least one end switch deactivates the anti-jamming device or anti-jamming mechanism, i.e. interrupts protective measures. This end switch typically activates with a degree of opening of 4-9 mm, which is so small that no objects could still be jammed. On the other hand, this guarantees that the door is not unintentionally reversed on closing. If the at least one end switch is activated, the door is pushed with defined force--and no longer with controlled speed--onto the muffle hole.
[0034]The speed measurement device may, however, also be used for other purposes, such as setting the displacement speed of the door. This alone is not yet known and also is not obvious.
[0035]The invention is particularly suitable for top-mounted cooking appliances in which the muffle hole is at the bottom and the door is a bottom door, which preferably moves in linear fashion.
[0036]The invention is described in greater detail below on the basis of the attached schematic diagrams, in which:
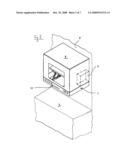
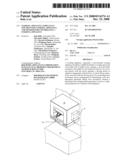
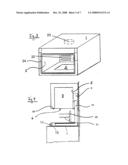
[0037]FIG. 1 shows a perspective view of a wall-mounted, top-mounted cooking appliance with bottom door lowered;
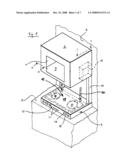
[0038]FIG. 2 shows a perspective view of the top-mounted cooking appliance with bottom door closed;
[0039]FIG. 3 shows a perspective view of a housing of the top-mounted cooking appliance without the bottom door;
[0040]FIG. 4 shows a schematic side view in cross-section along the line I-I from FIG. 1 of the wall-mounted, top-mounted cooking appliance with bottom door lowered;
[0041]FIG. 5 shows the front view of a further embodiment of a top-mounted cooking appliance;
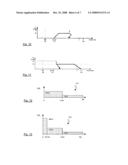
[0042]FIGS. 6 to 11 are diagrams of displacement movements of a bottom door under various basic conditions;
[0043]FIGS. 12 and 13 are force-time profile curves for a bottom door; and
[0044]FIG. 14 is a diagram of a preferred displacement movement when a thin object is jammed between a bottom door and a muffle.
[0045]FIG. 1 shows a top-mounted cooking appliance with a housing 1. The rear side of the housing 1 is attached to a wall 2 in the manner of a hanging cupboard. A cooking space 3 is delimited in the housing 1, which may be monitored through a viewing window 4 set into the front face of the housing 1. FIG. 4 shows that the cooking space 3 is delimited by a muffle 5, which is provided with a heat-insulating sheathing (not illustrated), and that the muffle 5 has a muffle hole 6 in the bottom surface. The muffle hole 6 can be closed with a bottom door 7. In FIG. 1 the bottom door 7 is shown in a lowered state, wherein it lies with its underside on a work surface 8 of a kitchen appliance. In order to close the cooking space 3, the bottom door 7 must be adjusted to the position shown in FIG. 2, known as the "zero position". For the purpose of adjusting the bottom door 7 the top-mounted cooking appliance has a drive mechanism 9, 10. The drive mechanism 9, 10 has a drive motor 9, shown by dashed lines in FIGS. 1, 2 and 4, which is disposed between the muffle 5 and an outer wall of the housing 1. The drive motor 9 is disposed in the area of the rear face of the housing 1, and--as shown in FIG. 1 or 4--is effectively connected to a pair of lifting elements 10, which are connected to the bottom door 7. According to the schematic lateral view from FIG. 4 each lifting element 10 is designed as an L-shaped carrier, whereof the horizontal legs extend out from the drive motor 9 on the housing side. In order to adjust the bottom door 7 the drive motor 9 may be activated with the help of an operating panel 12 und and a control circuit 13, which are disposed on the front surface of the bottom door 7 in accordance with FIGS. 1 and 2. As shown in FIG. 4, the control circuit 13 is located behind the operating panel 12 inside the bottom door 7. The control circuit 13, which is assembled in this case from several spatially and functionally separate PCBs that communicate via a communication bus, is a central control unit for operating the appliance and controls and/or regulates functions such as heating up, displacement of the bottom door 3, implementation of user inputs, illumination, an anti-jamming mechanism, timing of the heating elements 16, 17, 18, 22, and much more.
[0046]FIG. 1 indicates that an upper surface of the bottom door 7 has a cooking hob 15. Almost the entire surface of the cooking hob 15 is occupied by heating elements 16, 17, 18, which are shown in FIG. 1 by dashed lines. In FIG. 1 the heating elements 16, 17 are two separate cooking zone heating elements of different sizes, whilst the heating element 18 is a flat heating element provided between the two cooking zone heating elements 16, 17 that virtually surrounds the cooking zone heating elements 16, 17. The cooking zone heating elements 16, 17 define relevant cooking zones or hobs for the user; the cooking zone heating elements 16, 17 together with the flat heating element 18, define an under-surface heating zone. The zones may be indicated by an appropriate decor on the upper surface. The heating elements 16, 17, 18 can each be controlled via the control circuit 13.
[0047]In the exemplary embodiment shown, the heating elements 16, 17, 18 are designed as radiant heating elements which are covered by a vitroceramic plate 19. The vitroceramic plate 19 has roughly the same dimensions as the upper surface of the bottom door 7. The vitroceramic plate 19 is, furthermore, equipped with mounting holes (not illustrated), through which extend bases for supporting the retaining parts 20 for cooking product carriers 21, as also shown in FIG. 4. Other--preferably readily appealing--covers may also be used instead of a vitroceramic plate 19, e.g. a thin metal sheet.
[0048]With the help of an operating handle provided in the operating panel 12, the top-mounted cooking appliance may be switched to hob or under-surface heating mode, as explained below.
[0049]In hob mode the cooking zone heating elements 16, 17 are triggered individually via the control circuit 13 by means of operating elements 11, which are provided in the operating panel 12, whilst the flat heating elements 18 remain out of operation. The hob operating mode may be executed with the bottom door 7 lowered as shown in FIG. 1. It may, however, also be operated with the cooking space 3 closed, with the bottom door 7 raised up in an energy-saving function.
[0050]In under-surface heating mode, not only the cooking zone heating elements 16, 17 but also the flat heating elements 18 are triggered by the control device 13.
[0051]To ensure that the cooking product is browned as evenly as possible during under-surface heating mode, it is crucial that the cooking hob 15 providing the heat from below has equal distribution of the heat output over the surface of the cooking hob 15, even though the heating elements 16, 17, 18 have different nominal outputs. Thus the heating elements 16, 17, 18 are advantageously not switched to continuous operation by the control circuit 13, but the power supply to the heating elements 16, 17, 18 is delivered at timed intervals. This means that the different nominal heat outputs of the heating elements 16, 17, 18 are reduced individually so that the heating elements 16, 17, 18 achieve an even distribution of heat output across the surface of the cooking hob 15.
[0052]FIG. 4 is a schematic diagram showing the position of a fan 23, e.g. for generating circulating area in a hot-air mode or for supplying cool air. In addition, an upper heating element 22, which is attached to an upper side of the muffle 5, is provided, which may be designed with one or more rings, e.g. with an inner and an outer ring. Further heating elements, such as a ring element, may also be provided between the rear wall of the housing 1 and the muffle, though such heating elements are not illustrated here for the sake of clarity. The control circuit 13 may be used for setting the various operating modes, such as--for example--top heating, hot-air or rapid heating mode, by appropriate actuation and setting of the heating output of the heating elements 16, 17, 18, 22, with activation of the fan 23 if necessary. The heating output may be adjusted by means of a suitable timed delivery system. In addition the cooking hob 15 may have a different design, e.g. with or without grilling zone, as a single or multi-ring warming area without hob, and so on. The housing 1 has a seal 24 to the bottom door 7.
[0053]The operating panel 12 is arranged mainly on the front face of the bottom door 7. Alternatively, other arrangements are also possible, e.g. on the front face of the housing 1, distributed across different subpanels and/or partially on the lateral surfaces of the cooking appliance. Other designs are possible. The operating elements 11 are unrestricted in terms of their construction and may take the form of, for example, operating handles, toggle switches, push-buttons or membrane keys, which incorporate display elements 14 such as--for example--LED, LCD and/or touchscreen displays.
[0054]FIG. 5 is a schematic, not-to-scale diagram of a top-mounted cooking appliance drawn from the front, in which the bottom door 7 is opened and resting on the work surface 8. The closed state is drawn in dashed lines.
[0055]In this embodiment, two displacement switch panels 25 are located on the front face of the permanently mounted housing 1. Each displacement switch panel 25 comprises two push-buttons, namely an upper CLOSE button 25a for displacing the bottom door 7 upward in the closing direction, and a lower OPEN button 25b for displacing the bottom door 7 downward in the opening direction. Without automatic operation (see below) the bottom door 7 is displaced upward only by continuous, simultaneous pressure on the CLOSE buttons 25a of both displacement switch panels 25, if possible; the bottom door 7 is likewise also displaced downward only by continuous, simultaneous pressure on the OPEN buttons 25b of both displacement switch panels 25, is possible (manual operation). Since manual operation requires increased attention by the user during operation and, in this case, also requires the use of both hands, an anti-jamming mechanism is merely optional. In an alternative embodiment, displacement switch panels 26 are located on opposite outer surfaces of the housing 1 with corresponding CLOSE buttons 26a and OPEN buttons 26b, as indicated by the dotted lines.
[0056]The control circuit 13, which is shown by a hatched line on the interior of the bottom door 7 behind the operating panel 12, actuates the drive motor 9 so that the bottom door 7 begins to move gently, i.e. not abruptly by the drive motor 9 simply being started up, but by means of a defined ramp.
[0057]In this exemplary embodiment the control circuit 13 comprises a memory unit 27 for storing at least one destination or displacement position P0, PE, P1, P2, PZ of the bottom door 7, preferably with volatile memory components, e.g. DRAMs. If a destination position P0, P1, P2, PZ is stored, then the bottom door--after actuation of one of the buttons 25a, 25b or 26a, 26b on the displacement switch panels 25 or 26--automatically moves in the set direction until the next destination position is reached or one of the buttons 25a, 25b or 26a, 26b is actuated again (automatic operation). In this exemplary embodiment the lowest destination position PZ corresponds to the maximum open state, the (zero) position P0 corresponds to the closed state, and P1 and P2 are freely adjustable positions in between. Once the last destination position is reached for a direction, manual operation must be used for further displacement if this is possible (i.e. the final end positions do not correspond to the maximum open or closed end state). In the same way, if no destination position is stored for a direction--as would be the case, for example, for an upward movement to the closed position if only PZ is stored, but not P0, P1, P2, then manual operation must be used. If no destination position is stored, e.g. for a new installation or after a power outage, automatic operation is not possible. If the bottom door 7 is displaced, particularly in automatic mode, then an anti-jamming mechanism is preferably activated.
[0058]Automatic operation and manual operation are not mutually exclusive: continuous activation of the displacement switch panel(s) 25, 26 also causes the bottom door 7 to move in manual mode, if a destination position could be reached in this direction. In this case, for example, a maximum actuation time of e.g. 0.4 seconds for the displacement panels 25 or 26, or--more precisely--for the corresponding buttons 25a, 25b or 26a, 26b, may be set for activation of the automatic mode.
[0059]A destination position P0, P1, P2, PZ may be any position of the bottom door 7 between and including the zero position P0 and the maximum open position PZ. The maximum stored open position PZ need not, however, be the position resting on the work surface 8. The destination positions P0, P1, P2, PZ may be stored with the bottom door 7 at the required destination position P0, P1, P2, PZ, by pressing an actuation button 28 in the operating panel 12--for example--for several seconds (e.g. two seconds continuously). Existing optical and/or acoustic signal emitters, which emit appropriate signals when a destination position is stored, are not drawn for the sake of clarity. The required destination position P0, P1, P2, PZ to be set is reached--in this exemplary embodiment, for example--by operating the displacement switch panels 25 or 26 with both hands and manual displacement to this position.
[0060]Just one destination position, or--as shown in this exemplary embodiment--a plurality of destination positions P0, P1, P2, PZ, may be stored in the memory unit 27. If there is a plurality of destination positions P0, P1, P2, PZ these may be reached in succession by actuation of the corresponding displacement buttons 25a, 25b or 26a, 26b. Using a plurality of destination positions P0, P1, P2, PZ the top-mounted cooking appliance can easily be adjusted to the required operating height of several users. The destination position(s) may advantageously be canceled and/or overwritten. In one embodiment, for example, only one destination position may be stored in the open state, whilst the zero position P0 is automatically detected and can be automatically reached. Alternatively, the zero position P0 must also be stored in order to be automatically accessible.
[0061]It is particularly beneficial, in the interests of ergonomic use, for one or more of the destination positions P1, P2, PZ to open the bottom door 7 by at least approx. 400 mm to approx. 540 mm (i.e. P1-P0, P2-P0, PZ-P0>40 cm to 54 cm). With this degree of opening the cooking product carriers 21 can easily be placed in the retaining parts 20. In this instance it is beneficial if the viewing window 4 is set approximately at the user's eye level or slightly below, e.g. by means of a template indicating the size of the cooking appliance.
[0062]The diagrams do not show an existing mains power buffering for bridging power outages of approx. 1 to 3 seconds, and preferably up to 1.5 seconds of power outage.
[0063]The drive motor 9 from FIG. 1 has at least one sensor unit 31, 32 on a motor shaft 30, arranged either in front or behind a gear unit, in order to measure a displacement path or a position and/or a speed for the bottom door 7. The sensor unit may, for example, comprise one or more induction, Hall, optical or SAW sensors, etc. In this case, for simple measurement of path and speed, two Hall (partial) elements 31 are mounted on the motor shaft 30, offset by 180°--i.e. opposite one another--and a Hall meter 32 is installed at a fixed location in this area, at a distance from the motor shaft. If a Hall element 31 then travels past the meter 32 when the motor shaft 30 rotates, a measurement and/or sensor signal is generated that is, in good approximation, digital. Therefore, with (for example) two Hall elements 31, a rotation of the motor shaft 30 causes two signals to be emitted. If the timing of these signals is analyzed, e.g. the difference in time between them, then the speed vL of the bottom door 7 can be determined, for example via comparison tables or by conversion into real time in the control circuit 13. By addition or subtraction of the measurement signals, a displacement path or position for the bottom door 7 may be determined.
[0064]A speed regulator may implement the speed, for example by means of a PWM-controlled power semiconductor.
[0065]In order to determine the zero point, the path measurement is automatically readjusted at each actuation by initialization of the bottom door 7 in the zero position P0, so that--for example--an erroneous sensor output or recording is not implemented.
[0066]The drive motor 9 can be operated by actuation of both displacement switch panels 25 or 26 even if the main switch 29 is deactivated.
[0067]Instead of two separate switches for each displacement panel 25, 26, a single switch for each displacement panel is also possible, e.g. a toggle switch with neutral position, which actuates only under pressure. Other forms are also possible. Nor are the operating elements 28, 29 on the operating panel 12 restricted as to their type and arrangement.
[0068]The arrangement and distribution of the control circuit 13 is thus flexible and not restricted, and may therefore also comprise a plurality of PCBs, e.g. a display board, a control board and a lift board, which are spatially separate.
[0069]A 4-mm opening, for example, may be detected by end switches 33, which deactivate an anti-jamming mechanism upon actuation. Deactivation of the anti-jamming mechanism may, however, also be possible for example by counting pulses from the sensor signals, when a count value is reached which corresponds to a final measurement of--for example--8.6 mm.
[0070]The anti-jamming mechanism is thus deactivated independently of such mechanical end switches 33.
[0071]The top-mounted cooking appliance may also be designed without a memory unit 27, in which case automatic operation is not possible. This may be useful for increasing user safety, e.g. protection against jamming.
[0072]FIG. 6 is a not-to-scale diagram showing application of the displacement speed vL of the bottom door 7 in mm/s compared to the position of the bottom door in mm from the zero position P0 for a displacement of the bottom door 7 from the closed state where P0=0 mm to PZ=maximum opening, in this case 530 mm in manual displacement mode (i.e. without automatic displacement), and, as indicated by the dotted arrow, a stopping of the displacement movements between P0 and PZ. The curve will run in the direction of the arrow, i.e. from right to left. The downward-pointing arrows situated above the curve indicate actuations of the operating panel 12.
[0073]The displacement of the bottom door 7 downward starts with the two-handed actuation of the displacement switch panels 25, 26 or of the OPEN switches 25b or 26b, as indicated by the perpendicular arrow on the top left. The control circuit 13 controls the drive motor 9 so that the bottom door 7 starts up gently, i.e. with a defined ramp R1, to its target speed vL of (in this case) 50 mm/s. The ramp R1 is linear in this case. The drive motor 9 is therefore not simply activated.
[0074]The displacement movement is therefore also load-independent, in particular it is independent of the loading of the bottom door 7 or changes in the frictional conditions of the mechanism. An input variable for this purpose may be the number of rotations of the drive motor 9. These may be measured by Hall sensors, for example.
[0075]Once the target speed vL=50 mm/s is reached the bottom door 7 travels constantly downward until it is close to the maximum opening PZ, which results from the constructively preset maximum displacement of the bottom door 7 or from the reaching of the work surface 8. In this diagram it is assumed that the constructive maximum opening PZ is reached. In this case the control circuit 13 detects this approach and, gently and automatically, slows down the bottom door 7, i.e. with a defined ramp R2, at PZ. The two ramps R1 and R2 may have other gradients or forms. The approach to the base plate may be detected by end switches 33 and/or by monitoring of the displacement path.
[0076]If one or both of the displacement switches 25b, 26b is released, as indicated by the perpendicular arrow on the top left, the bottom door 7 stops abruptly without ramp, as indicated by the dotted arrow. In this mode, therefore, the movement is started gently but halted abruptly, unless the end position is reached.
[0077]The cooking space 3 is not opened, and the bottom door 7 is therefore not displaced from the zero position P0, if an anti-opening safeguard is active, i.e. if, for example, a defined temperature e.g. 425° C. or 600° F. is exceeded in the cooking space, or if a child safety feature is activated.
[0078]FIG. 7 is a not-to-scale diagram similar to FIG. 6, showing a displacement of the bottom door 7 from the closed state to a stored position P1=476 mm in automatic displacement mode.
[0079]In this case, as a result of brief activation of one of the OPEN switches 25b or 26b, as indicated by the perpendicular arrow on the top right, the bottom door 7 starts to move automatically to the position P1. Here, too, the bottom door 7 is started up gently (right-hand ramp) and slowed down automatically (left-hand ramp). In this embodiment it is possible, in automatic mode, to select between two fixed target speeds, i.e. 75 mm/s (dashed line) and 50 mm/s (solid line), wherein the lower speed is particularly ideal for elderly users. The slower speed level is preset, e.g. upon delivery. More than two speed levels or target speeds may also be provided; the free adjustment of target speed(s) by the user is also a possibility. Ideally it is also possible to switch between at least two speed levels of 50 mm/s and 65 mm/s, e.g. when an appliance is initialized.
[0080]FIG. 8 is a not-to-scale diagram showing a displacement of the bottom door 7 from the maximum open position PZ to the zero position P0, i.e. to the closed state, in manual operating mode.
[0081]The displacement of the bottom door 7 upward starts with the two-handed actuation of the CLOSED switches 25a and 26a, as indicated by the perpendicular arrow on the top left. The control circuit 13 controls the drive motor 9 so that the bottom door 7 starts up gently from PZ to its target speed of vL=50 mm/s, and then travels constantly at this target speed (toward the right).
[0082]The control circuit 13 detects an approach to the zero position P0 and gently slows down the bottom door 7 in good time beforehand. Now, however, instead of moving downward directly to the zero position P0 by means of the linear ramp, the speed-dependent control is switched to control with defined voltage 4 mm before the zero position P0, i.e. by supplying the motor 9 with a corresponding voltage. This enables maximum power development to be set if the drive motor 9 is blocked. This voltage varies according to the history of the displacement (loading, frictional conditions, etc.). The 4 mm opening is detected by the path measurement or additionally or alternatively via the end switches 33. An anti-jamming mechanism can also be dispensed with in the range from P0 to P0+4 mm.
[0083]If, as in FIG. 6, one or both of the displacement switches 25b, 26b is released, as indicated by the perpendicular arrow on the top right, the bottom door 7 stops abruptly without ramp, as indicated by the dotted arrow.
[0084]FIG. 9 shows a not-to-scale diagram for a displacement of the bottom door 7 from a stored position P1=476 mm to the closed state P0 in automatic displacement mode. In contrast to the manual displacement mode shown in FIG. 8, only one of the CLOSED switches 25a, 26a now needs to be briefly activated, as indicated by the upper perpendicular arrow. The bottom door 7 then moves similarly to the manner shown in FIG. 7, only in the other direction. When the zero position P0 is approached, then--similarly to the situation from FIG. 8--the braking ramp switches from a speed-controlled state to a load or closing force-controlled state for the last 4 mm opening.
[0085]FIG. 10 is a diagram similar to that shown by FIG. 8, in which a jam now occurs at a target speed of vL=50 mm/s, as indicated by the upper perpendicular arrow. If, for example, a hand or a pan etc. becomes jammed between the bottom door 7 and the housing 1, the speed of the bottom door 7 drops away since the object prevents any further displacement. The lift speed is monitored here, for example, by analysis of the sensor signals from the motor shaft, wherein--for example--the time between the measurement signals or pulses is analyzed. The motor current is only monitored in the second instance, this being a somewhat slower method. In particular the power that may be generated by the motor 9 for displacement is limited, to prevent accidents caused by excessively severe jamming (see also FIGS. 12 and 13). The deviation from the target speed is detected by the control circuit 13, e.g. by a speed deviation or a temporary change in speed. The bottom door is thereupon reversed so that the object may be removed; a warning signal, e.g. acoustic, may also be emitted. The bottom door 7 thereafter only starts up again upon renewed actuation of a displacement keypad 25, 26.
[0086]To prevent incorrect triggering of a jammed state, e.g. by a change in loading or a change in the running properties of the mechanism, the anti-jamming mechanism, firstly, may be activated only when the bottom door 7 has reached its target speed (if a displacement button 25a, 25b, 26a, 26b is first released before this, the bottom door 7 stops immediately), and, secondly, a plurality of sensor signals are analyzed, for example to obtain an average figure.
[0087]FIG. 11 shows the jammed state (upper perpendicular arrow) during the opening displacement of the bottom door 7 in automatic mode to a destination position P1, in which an object is jammed between the lower surface of the bottom door 7 and the work surface 8. In this case the jam may be detected via two redundant end switches, which detect a particularly uneven easing of the load on the bottom door 7, whereupon the drive motor 9 reverses. The maximum permitted force-time profile (see FIGS. 12 and 13) is thereby not exceeded.
[0088]FIG. 12 shows a maximum force F in N that may be applied to the bottom door 7 in the event of a jam during the displacement in a closing direction (i.e. upward), against the elapsed time t in s as a first force-time profile FT1.
[0089]If a jam occurs at t=0 s the potential closing force is limited to 100 N, corresponding to approx. 10 kg, for 5 s. This makes sense, for example, if the motor 9 is adjusted upward by the control device 13 in order to maintain the target speed. This ensures, in particular, that body parts are not injured. If the bottom door is drawn up for 5 s with (maximum) 100 N, the maximum applicable force is reduced further to 25 N, e.g. for 5 seconds. This level of force can be maintained subsequently or, for example, reduced further to 0 N. It must be stressed that this force-time profile FT1 shows only the maximum applicable force, and the force actually applied is usually lower, e.g. if the jam is detected by the control device 13 and the bottom door 7 is reversed accordingly after t=0.5 s, whereupon the applied force is reduced from 100 N to e.g. 0 N.
[0090]The maximum force threshold value of 100 N may also apply for other displacement situations.
[0091]FIG. 13 shows a maximum force F in N that may be applied to the bottom door 7 in the event of a jam during displacement in an opening direction (i.e. downward), against elapsed time t in s as a second force-time profile FT2. In this case the drive motor 9 may apply up to 400 N to the bottom door 7 in a first block of t=[0 s; 0.5 s], and thereafter 150 N at t=[0.5; 5 s] and thereafter 25 N.
[0092]Of course, the time intervals and force threshold values of the force-time profiles FT1, FT2 may be adjusted to the structure and other basic conditions.
[0093]FIG. 14 shows an exemplary displacement profile for the memorization of functions, wherein--during the displacement of the door 7--a parameter vr dependent upon the displacement of the door 7 is determined as a reference parameter. A reference speed is particularly preferred as the reference parameter vr.
[0094]The parameter is determined, in particular, after the cooking appliance is installed and when it is first commissioned, in order to take into account environmental influences at the place of installation. It is particularly advantageous, however, for the definition of the parameter to be repeated so that environmental influences that change over time or even internal features of the cooking appliance can also be taken into account. It is particularly advantageous for such a parameter to be memorized with each displacement of the door, particularly each time the door is raised, in order--for example--to enable a constantly variable load to be taken into account.
[0095]FIG. 14 shows, by way of example, a speed profile of a displacement speed vL, wherein a speed v in mm/s is shown over a current position P of the door 7 in mm.
[0096]Where numerical details are provided these must be regarded as purely exemplary.
[0097]Starting from an end position PZ, which corresponds to a fully opened door 7, the door 7 is raised in the direction of the muffle 5 whilst being accelerated. Once a lower interim position pa is reached, the door 7 is moved upward with a constant displacement speed vL.
[0098]A further function of the cooking appliance may be triggered depending on the displacement speed vL as an exemplary parameter. Thus, for example, a jammed state may be detected if the displacement speed is below a target displacement speed vR before an upper interim position pb is reached, after which point the door 7 is moved toward the muffle 5 with decreasing speed.
[0099]The deviation below a permitted minimum speed vS is preferably defined as a criterion for the emission of a jammed signal or the registering of a jammed state. In principal, however, a fault may also generally be detected when the speed falls outside a tolerance range vT, wherein the speed tolerance range vT is likewise preferably preset dependent upon the current operating conditions.
[0100]In the illustrated exemplary displacement profile the jammed state situation is drawn, in which the displacement speed vL falls off before the upper interim position pb is reached and is lower than the permitted target or minimum speed vS, as illustrated on the basis of the outlined jam-speed profile. In such a case the door 7 is preferably accelerated in the opposite direction (reversed) and moved downward by an opening path s to enable a jammed object to be removed, as outlined by means of the exemplary reset-speed profile v2.
[0101]Since the constant speed that may be achieved for the cooking appliance for raising the door 7 may vary depending on the current load on the door 7 and/or depending on current external and internal operating conditions, the cooking appliance may not be able to reach a normally permissible minimum speed vS, then--for functions such as, for example, the monitoring of a jammed state--it is preferable for a memorized parameter, such as the reference speed vr, to be used as the basis as the reference parameter for a target speed vR that is to be used.
[0102]Depending on such a reference parameter, which is determined once, after installation of the cooking appliance or subsequently, as being the parameter to be determined and, in particular, to be measured, a permissible minimum speed vS and/or a speed tolerance range vT are then defined individually in each case.
[0103]The reference parameter, in particular the target speed vR, is preferably determined after the lower interim position pa is reached, after which point the door 7 moves upward at a constant speed. The reference speed vr can preferably be determined on an initial path section as a reference path sr, so that a parameter determined over such a reference path may already be used for the continued upward displacement of the door 7.
[0104]In principal, however, it is also possible for the parameter to be determined over a reference path sr* which is already within the acceleration range of the door 7 between the end position PZ and the lower interim position pa. In particular, such a definition can therefore be carried out advantageously if--apart from an initial acceleration on start-up and a transition phase to the constant speed--there is a constant acceleration phase.
[0105]In principal, however, it is possible for the reference parameter to be determined over a greater range, possibly even over the entire displacement path. The inclusion of the entire displacement path, inclusive or exclusive of acceleration or deceleration ranges, may be used in normal operation, particularly for the detection of faults or changes in the displacement conditions (friction, leverage, etc.). In the event of a fault a service signal may, for example, be emitted, which alerts the user to the need for lubrication or maintenance of guide rails or of a drive module.
[0106]When parameters are memorized, such as the reference speed vr as a parameter, a procedure is preferred in which an operator must keep one, or preferably two, buttons 25a, 26a, pressed down for the duration of the parameter setting process over a specific predefined, particularly initial, lifting path of the door 7. For example a user must hold down the button(s) for at least two seconds when the door is started up, enabling the appliance to reach the ramp or the lower position pa and to travel through the reference definition section sr. If the button(s) is/are released early, the result is that the reference value vr cannot be correctly determined, which may--for example--lead to an anti-jamming mechanism not being activated on the basis of the displacement speed vL, which is why--in turn--automatic displacement mode is not permitted. Releasing of the button therefore causes the displacement to stop and the parameter definition process to be aborted. Even in subsequent displacement movements, it is preferable for the definition of a parameter to be aborted in the event of a fault, such as--for example--a jammed state, to ensure that no parameters determined on the basis of an incorrect displacement movement are stored.
[0107]In addition to the definition of the reference parameter vr, the latter--as already described above--may also be readjusted by monitoring and adjusting it for small, systematic changes, e.g. due to variable frictional or leverage conditions, over one or more additional ranges. This readjustment is preferably carried out within the range of a constant target value, e.g. in the range of a constant displacement speed.
[0108]A parameter may be permanently stored in the cooking appliance upon being memorized for the first time. It is useful, however, for such a parameter to be updated from time to time or even with each displacement movement, so that changing operating conditions are taken into account.
TABLE-US-00001 List of reference characters 1 Housing 2 Wall 3 Cooking space 4 Viewing window 5 Muffle 6 Muffle hole 7 Bottom door 8 Work surface 9 Drive motor 10 Lifting element 11 Operating element 12 Operating panel 13 Control circuit 14 Display elements 15 Cooking hob 16 Heating element 17 Heating element 18 Flat heating element 19 Vitroceramic hob 20 Retaining part 21 Cooking product carrier 22 Upper heating element 23 Fan 24 Seal 25 Displacement switch panel 25a Upward displacement switch 25b Downward displacement switch 26 Displacement switch panel 26a Upward displacement switch 26b Downward displacement switch 27 Memory unit 28 Confirmation button 29 Main switch 30 Motor shaft 31 Hall element 32 Meter 33 End switch FT1 First force-time profile FT2 Second force-time profile P Position pa Lower interim position pb Upper interim position P0 Zero position PZ End position PS Reversing position R1 Speed ramp R2 Speed ramp ds Jammed signal sr, sr* Reference paths v2 Reset speed profile vr Reference parameter (reference speed) vR Target speed vS Minimum speed vT Speed tolerance range vL Displacement speed of bottom door
User Contributions:
comments("1"); ?> comment_form("1"); ?>Inventors list |
Agents list |
Assignees list |
List by place |
Classification tree browser |
Top 100 Inventors |
Top 100 Agents |
Top 100 Assignees |
Usenet FAQ Index |
Documents |
Other FAQs |
User Contributions:
Comment about this patent or add new information about this topic:
| People who visited this patent also read: | |
| Patent application number | Title |
|---|---|
| 20220210916 | SUBSTRATE STRUCTURE AND MANUFACTURING METHOD THEREOF, ELECTRONIC DEVICE |
| 20220210915 | CIRCUIT BOARD |
| 20220210914 | COPPER CLAD LAMINATE AND PRINTED-CIRCUIT BOARD |
| 20220210913 | PRINTED CIRCUIT BOARD |
| 20220210912 | WIRING BOARD AND METHOD FOR MANUFACTURING WIRING BOARD |
Images included with this patent application:
 |  |
 |  |
 |  |
 |  |
| Similar patent applications: | |
| Date | Title |
|---|---|
| 2012-09-06 | Cooking grate assembly and cooking apparatus |
| 2012-06-21 | Baking device and method for operating a baking device |
| 2012-06-07 | High-speed cooking oven with cooking support |
| 2010-08-05 | Alcohol stove and method for igniting an alcohol stove |
| 2011-01-06 | Nozzle assembly and cooking appliance |
| New patent applications in this class: | |
| Date | Title |
|---|---|
| 2019-05-16 | Air circulation-type electric roaster |
| 2014-01-16 | Waterproof capacitive touch system for an appliance |
| 2013-11-28 | Home appliance with undistorted front panel curvature |
| 2012-05-17 | Heating cooker |
| 2012-03-15 | Filter unit, filtration method and system |
| New patent applications from these inventors: | |
| Date | Title |
|---|---|
| 2016-11-17 | Temperature measurement on a surface heater for a household appliance |
| 2016-11-17 | Operating device for domestic appliance |
| 2013-10-03 | Connecting element, household appliance having such a connecting element, and insert module |
| Top Inventors for class "Stoves and furnaces" | |
| Rank | Inventor's name |
|---|---|
| 1 | Paul Bryan Cadima |
| 2 | David Deng |
| 3 | Andrew Plotkin |
| 4 | Peter Emery Von Behrens |
| 5 | Derek W. Schrock |