Patent application title: Tandem Carriage Railcar Indexer
Inventors:
Bradley J. Goldbeck (Delano, MN, US)
Assignees:
Calbrandt, Inc.
IPC8 Class: AB61J308FI
USPC Class:
104162
Class name: Railways traction pusher
Publication date: 2014-09-18
Patent application number: 20140261056
Abstract:
A railcar indexer system is disclosed that includes a design that enables
extremely high loads to be moved without exceeding present railcar
limitations. The railcar handling system of the present invention employs
hydraulically-operated indexers that divide the load between consecutive
dog carriages that, in turn, operate to apply force to railcar bogey
frames or axles on consecutive railcars. This transfers a large amount of
force to be applied to a lead railcar and enables a much larger amount of
force to be applied to the next railcar and a larger total force to be
applied to a string of railcars.Claims:
1. A railcar handling system comprising: (a) an indexing unit including a
pair of aligned sequentially positioned, hydraulically-operated dog
carriages that carry railcar-engaging dogs and operate as lead and
trailing dog carriages during a power stroke and are situated to address
bogey frames or axles of consecutive railcar trucks of two connected
railcars; and (b) a hydraulic operating system for operating the dog
carriages and associated dogs that functions in a manner such that force
applied to the railcars is divided between the carriages enabling maximum
allowable force to be applied to each of two consecutive connected
railcars at the same time.
2. A railcar handling system as in claim 1 configured to address bogey frames further comprising a pair of coordinated units, one on either side of a railroad track thereby providing dogs that address both sides of consecutive bogey frames.
3. A railcar handling system as in claim 1 wherein the unit is disposed between the rails of a track and the dogs are designed to address axles of consecutive railcar trucks.
4. A railcar handling system as in claim 1 wherein the hydraulic operating system further comprises a plurality of consecutive, series-connected hydraulic cylinders, a final one of which is attached to a trailing dog carriage, at least one further series-connected tandem cylinder connected between the trailing dog carriage and the lead dog carriage that transfers and applies force to the lead dog carriage as a percentage of the force applied to the trailing dog carriage.
5. A railcar handling system as in claim 4 including a pair of spaced parallel tandem cylinders.
6. A railcar handling system as in claim 5 wherein the force applied to the lead dog carriage during a power stroke is one-half that applied by the trailing dog carriage.
7. A railcar handling system as in claim 1 wherein the carriage dogs are hydraulically raised against a downward bias.
8. A railcar handling system as in claim 1 wherein the direction of operation is reversible.
Description:
CROSS-REFERENCED TO RELATED APPLICATIONS
[0001] Not applicable
STATEMENT REGARDING FEDERALLY SPONSORED RESEARCH OR DEVELOPMENT
[0002] Not applicable
BACKGROUND OF THE INVENTION
[0003] I. Field of the Invention
[0004] The present invention relates generally to trackside railway car handling equipment for positioning railcars along a track for loading or unloading operations. More particularly, the present invention relates to train positioning systems that employ a tandem dog carriage arrangement that enables force to be applied to consecutive railcars which greatly increases the total force available for an indexer to move a string of railcars without exceeding the maximum force allowable on any one railcar. Embodiments of the system of the present invention can be used to operate by engaging the bogey frames or axles of railcars.
[0005] II. Related Art
[0006] Freight-hauling railway cars need to be precisely positioned proximate freight or cargo handling equipment during loading and unloading operations. Freight in the form of bulk cargo such as grain is typically loaded or unloaded with reference to stationary freight handling equipment such as chutes and conveyor equipment situated at fixed locations above or in pits beneath a specific dedicated portion of the track. Railcars for transporting grain or other such finely divided dry bulk agricultural commodities may be covered and designed with a plurality of spaced bottom discharge hopper bins or chutes accessing the main cargo storage volume. The chutes are closed by capstan-operated rack and pinion bottom closure gate systems.
[0007] In the loading and discharge operations, a connected engine roughly positions one end of a string of cars to be loaded or unloaded beneath or above the appropriate equipment at the desired fixed location. Because locomotives are not well suited for precisely positioning individual cars or even strings of cars along a railroad track, positioning devices known as train movers or positioners are located at fixed stations along the track. The positioning devices generally employ heavy pushing members known as railcar-engaging "dogs" to move the cars into position.
[0008] Positioning devices generally classified in the industry as "indexers" position railcars using dogs to push against railcar bogey frames or axles. Bogey frame indexers may employ dogs carried by a pair of carriages operating along indexer tracks on built-in guideways located on opposite sides of associated track rails. Indexers are designed so that the carriages and associate dogs on both sides of the track are coordinated to operate together in unison to engage and move a car or string of cars along the track. Thus, in indexer type bogey frame-engaging positioning devices, dogs on opposite sides of the track are caused to engage the bogey frame during the same stroke to thereby provide a balanced force by pushing against both of the spaced sides of the truck bogey frame simultaneously. Axle-type indexers include a single carriage operated between the tracks that employs dogs to engage truck axles rather than bogey frames.
[0009] Using either type system an entire string of connected cars may be advanced with precision and loaded or unloaded, one car at a time. With the indexer system, the operation can be stopped at any point in the operating cycle when the desired position is reached. These systems may typically be operated using hydraulic cylinders to advance and retract dog carriages and to raise and lower the dogs.
[0010] Operation of car handling equipment in each of the modes described above has certain advantages and either may be desirable depending on operational circumstances and conditions. As indicated, a bogey-frame indexer advantageously provides a balanced side-to-side force on the bogey frame and enables the total force of two dog carriage systems to be applied at once so that heavier loads may be moved. This also enables a balanced force to be applied against the bogey frames of lightly loaded cars which avoids a possible derailing situation which may occur when force is applied to one side only. However, current railcar designs limit the maximum pushing effort that can be applied to a bogey frame. The total applied force is limited to about 120,000 pounds (˜54,420 kg) when the force is applied on both sides of the frame. For an axle system, the maximum allowed is even less. Current railcar designs limit the allowable pushing effort to 75,000 pounds (˜34,000 kg) on an axle.
[0011] These load limitations force the indexers to limit the permissible loads to be moved to a lesser amount than is often desired by system users. Therefore, it would be highly desirable if a system could be developed that would enable higher loads to be moved without exceeding the design tolerances of the railcars.
SUMMARY OF THE INVENTION
[0012] By means of the present invention, there is provided a railcar indexer system that includes a design that enables extremely high loads to be moved without exceeding present railcar limitations. The railcar handling system of the present invention employs hydraulically-operated indexers that divide the load between multiple dog carriages that, in turn, operate to apply force to a plurality of railcar bogey frames or axles on consecutive railcars. This basically doubles the amount of force that can be applied to a string of railcars.
[0013] One preferred embodiment employs two dog carriages in tandem with a lead dog carriage designed to engage the last bogey frame or axle of a first or lead railcar and the trailing dog carriage designed to engage the first bogey frame or last axle of the first bogey frame of the second or trailing railcar. The system includes a plurality of consecutive, series-connected hydraulic cylinders. The final cylinder of the plurality of cylinders or trailing carriage cylinder is attached to the trailing dog carriage. An additional, or tandem, cylinder is located between the two dog carriages. The tandem cylinder is used to transfer and apply force to the lead dog carriage during a power stroke. The tandem cylinder is preferably designed to exert one-half of the force of, and is connected in series with, the trailing carriage cylinder. Of course, the tandem cylinder may be sized to deliver any desired percentage of the force of the trailing carriage cylinder. Thus, when the indexer is fully engaged in the preferred embodiment, the maximum allowable force can be exerted against the last bogey frame or axle of the first or lead railcar by the lead dog carriage and double the allowable force can be exerted against the first bogey frame or an axle of the first truck of the second or trailing railcar. This results in a transfer of one-half of the force applied to the tracking railcar to the lead railcar. This, in turn, results in an ability to double the total force exerted with respect to a connected string of cars without exceeding the force allowed on an individual bogey frame or axle.
[0014] The system designed as a bogey frame engaging system includes one tandem carriage arrangement on each side of the track. The system designed to engage the railcar axles is located between the rails so that the dogs engage the center of the axle.
BRIEF DESCRIPTION OF THE DRAWINGS
[0015] In the drawings:
[0016] FIG. 1A is a schematic plan or general layout view of a bogey frame engaging indexer in accordance with the invention with parts broken away for convenience;
[0017] FIG. 1B is a side elevational view of the indexer of FIG. 1A;
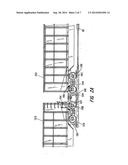
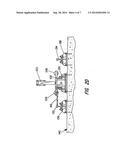
[0018] FIG. 2A is a fragmentary side elevational view of railcars engaged by the indexer of FIG. 2B;
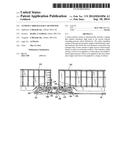
[0019] FIG. 2B is a fragmentary schematic side elevational view of the indexer of FIG. 2C
[0020] FIG. 2C is a partial schematic plan or general layout view for an axle-engaging indexer in accordance with the invention with parts broken away for clarity;
[0021] FIG. 2D is an enlarged sectional view through the system of FIGS. 2A and 2B showing a raised dog;
[0022] FIGS. 3A-3C depict a hydraulic schematic for an indexer in accordance with the invention.
DETAILED DESCRIPTION
[0023] The following detailed description is directed to one or more embodiments of the invention which are presented as examples and are not intended to limit the scope of the invention in any way as variations that are within the scope of the inventive concepts may occur to those skilled in the art.
[0024] Terms such as "left, right, first, second, lead, trailing, up, down, horizontal, vertical" are arbitrary or general terms taken in connection with the figures and should not be construed as absolute terms.
[0025] FIGS. 1A and 1B show schematic plan layout and side elevational views of a bogey frame engaging indexer in accordance with the invention. The indexer system, generally at 10, includes two identical units, which may be designated for convenience as a left unit 12 and a right unit 14 mounted in guideways 16 and 18, respectively, situated on opposite sides of a railroad track having left and right rails 20 and 22. The system is generally designed to move railcars from right to left with respect to the drawing. Inasmuch as the two units are substantially identical, only one needs to be described in detail here. Thus, right unit 14 will be described.
[0026] Right unit 14 employs two dog carriages in tandem, including first or lead dog carriage 24 and second or trailing dog carriage 26 with a hydraulic cylinder 28 mounted between and separating the dog carriages. The unit is operated by a plurality of consecutively mounted serially connected hydraulic cylinders, some of which are shown at 30 and 32. It will be appreciated that the combined stroke length of the consecutively mounted cylinders determines the maximum indexer stroke length and the maximum length of a railcar that can be accommodated in a string of railcars. Raised dogs are shown at 40 and 42.
[0027] FIGS. 2A-2D illustrate an embodiment of the railcar indexing system of the invention directed to engage the axles of railcars. A partial schematic plan or general layout view is shown generally at 100 in FIG. 2C and includes a first or lead dog carriage 102 and second or trailing dog carriage 104. The carriages are connected by a pair of spaced hydraulic cylinders 106 and 108 and carriage 104 is connected to be moved by a number of serially-connected hydraulic cylinders, several of which are shown in part at 110, 112 and 114. It will be appreciated that any number of cylinders can be used and the total stroke length of the system will depend on the combined extension of the serially-connected cylinders.
[0028] Dog carriage 102 carries a pair of opposed pusher dogs 120 and 122 and dog carriage 104 carries a pair of similar pusher dogs 124 and 126. The dog carriages operate along a guideway 130 located between track rails 132 and 134. As best seen in FIG. 2D, the rails in the area of operation of the system are supported on spaced rail spacers as at 136 and 138, rather than cross ties, and the rail spacers and guideway are fixed to a concrete footing 140. A railcar wheel sensor device is shown at 142.
[0029] FIG. 2A depicts fragmentary views of consecutive joined railcars 150 and 152. The last support truck of first or lead railcar 150 is shown at 154 and the first truck of the second or trailing railcar is shown at 156. Dog 122 is seen engaging axle 158 of truck 154 and dog 126 is seen engaging axle 160 of truck 156. It will be appreciated that, although the system is described as moving the railcars from right to left in the drawings, it is a reversing system and can use dogs 120 and 124 to move the railcars from left to right, if desired.
[0030] FIGS. 3A-3C together depict a schematic hydraulic diagram of one suitable hydraulic operating system for an indexer in accordance with the invention, including valves and switching devices used to control and coordinate the operation of one indexing unit. Connectors A, B, C, D, E, F, G and H simply indicate correspondence to like designated lines in an adjacent view.
[0031] The hydraulic system includes a main hydraulic pump 202, which may be a variable displacement piston pump, such as a 60 GPM pump, driven by a suitable motor 204, which may be a 75 horsepower, 1800 RPM, 575/3/60 motor connected by a suitable coupling at 206. The pump input line 208 includes a strainer 210 and shutoff valve 212. A drain connection is shown at 214 and a fluid reservoir at 216. High pressure output line 218 includes a filter arrangement with by-pass line 220, a check valve 222, and flow selection valves 224 and 225. A proportional pressure relief valve is shown at 226. Manifold 1 is depicted by broken line 228. A three-position system control valve is shown at 230 that connects line 218 with an extend line 232, a retract line 234, and includes connections to a return line 314 and drain line 318.
[0032] As seen in FIGS. 3A and 3B, the illustrative indexer may be described as moving railcars from right to left in the drawing and is, but as indicated above, a reversing system that can operate in either direction. The carriage-moving aspect of the indexer is characterized by four serially connected cylinder, including static or stationary cylinder 240 and dynamic or moving cylinders 242, 244 and 246 and a pair of spaced parallel fifth and sixth tandem cylinders 248 and 249 mounted between and in line with tandem dog carriages 250 and 252.
[0033] Carriage 250 includes a pair of spaced opposed dogs 254 and 256 operated by cylinders 258 and 260, respectively. Carriage 252 includes opposed dogs 262 and 264 operated by cylinder 266 and 268, respectively. Carriage 252 may be designated as the first or lead dog carriage and carriage 250 as the second or trailing dog carriage. Manifold 3, designated by broken line 270, further includes extend line 272, retract line 274 and solenoid valve 276, which operate tandem cylinder 248, as will be described. Manifold 4, associated with first or lead dog carriage 252, is outline by broken line 280 and supplied by extend and retract lines 282 and 284 and includes solenoid valve 286.
[0034] Manifold 1 further contains counterbalance valves 290 and 292, solenoid valves 296, 298, 300, 302, 304 and 306. Valve 308 and lines 310 and 312 are part of a decompression circuit associated with lowering the dogs that allows high pressure hydraulic fluid to be metered back to the reservoir when solenoid 298 is energized. Return lines are shown at 314 and 316. Line 314 includes a return fluid cooling arrangement 320 and a return fluid filter 322.
[0035] Additional valves and gauges are shown in Manifold 2, outlined at 330. Thus, retract pressure gauge 332 measures the retraction pressure in parallel line at 336. Extend pressure gauge 342 measures the pressure in connected line 338 at 340. Gauge 344 measures the front pump pressure in line 346 at 348.
[0036] Reservoir 216 includes low liquid level and low temperature switches at 360 and 362, respectively. A heater 364 and sight gauge 366, along with a reservoir isolator shown at 368. Limits for the system are normally set so that the hydraulic fluid must be at least 20° F. at startup and the operating range should be about 107° F. to 140° F.
[0037] In operation, it will be appreciated that, in the case of a bogey frame engaging system, there will be a unit on each side of the track and they will coordinate. Both units may be operated by a common hydraulic system, however. In an axle-engaging system, one system will be located between the rails of the track.
[0038] The operation begins with a string of connected railcars being advanced into a position close to an unloading pit, or the like, to be acted upon by the indexer. With the pump operating, oil in extend line 232 is supplied to the blind end of cylinder 240 and the four serially connected cylinders 240-246 begin to extend. As the cylinders extend, oil is expelled from the rod end of cylinder 246 into line 274. The dogs are biased, as by strong springs in a down position and considerable fluid pressure is required to raise the dogs. The pressure in the lines is insufficient to raise the dogs 254 and 256, although the rod ends of cylinders 258 and 260 are connected. Oil displaced from cylinder 246 bypasses counterbalance valve 290 through an energized valve 302. The cylinders 240-246 continue to extend and move dog carriages 250 and 252 to the left until a wheel is sensed by a wheel sensor on carriage 250 that detects the presence of a railcar truck. At this point, solenoid 302 de-energizes forcing the oil to flow from the rod end of cylinders 240-246 through counterbalance valve 290 putting full pressure on cylinders 250 and 260 which causes dogs 254 and 256 to rise. When the sensors indicate dogs 254 and 256 have risen, solenoid 276 energizes allowing flow into the blind end of cylinders 248 and 249 causing them to extend. The cylinders 240-249 continue to extend and move dog carriages 250 and 252 to the left until a wheel is sensed by a wheel sensor on carriage 252 that detects the presence of a railcar truck. At this point, solenoid 286 is caused to switch and fluid in line 284 causes the dogs 262 and 264 to rise.
[0039] In the above manner, consecutive bogey frames of two railcars are addressed by the dogs of consecutive carriages. At the same time, an identical unit is operated on the opposite side of the track so that both sides of both bogey frames are encountered and subjected to equal force. The total force enabled is the sum of the force exerted by the two units. With an axle-engaging unit, the total force is that of a single, central unit.
[0040] The internal cross-sectional area of each of the tandem cylinders 248 and 249 is preferably sized to be one-quarter of that of cylinders 240-246 so that it provides one-quarter of the force of the cylinders 240-246. In this manner, together cylinder 248 and 249 produce one-half the force of cylinders 240-246. Thus, if the dogs of carriage 252 are enabled to push against the bogey frame of the lead railcar using the maximum allowable force, the allowable force exerted by the dogs of carriage 250 can be twice that amount. The combination enables the system, in effect, to exert the maximum allowable force against two consecutive railcars, thereby providing double the total force available to move a string of connected railcars.
[0041] Likewise, the axle-engaging indexer will split the load between the last axle of the first or lead car and the second axle of the first truck of the second or trailing railcar.
[0042] It will also be appreciated that longer systems may be provided that address three cars, or even more, if desired, using additional carriages and cylinders to push against additional bogey frames or axles.
[0043] This invention has been described herein in considerable detail in order to comply with the patent statutes and to provide those skilled in the art with the information needed to apply the novel principles and to construct and use embodiments of the example as required. However, it is to be understood that the invention can be carried out by specifically different devices and that various modifications can be accomplished without departing from the scope of the invention itself.
User Contributions:
Comment about this patent or add new information about this topic:
Images included with this patent application:
 |  |
 |  |
 |  |
 |  |
| Similar patent applications: | |
| Date | Title |
|---|---|
| 2015-02-05 | Device to maintain a trajectory of a guided vehicle in the event of derailment and/or failure of guidance. |
| 2015-01-22 | Onsite steel rail laser processing vehicle |
| 2015-02-19 | Overhead rail guidance and signaling system |
| New patent applications in this class: | |
| Date | Title |
|---|---|
| 2015-03-26 | Ratcheting railcar indexer |
| 2010-10-14 | Railcar positioning system |
| 2008-09-25 | Car wash roller |
| New patent applications from these inventors: | |
| Date | Title |
|---|---|
| 2011-08-04 | Hydraulic motor with non-contact encoder system |
| Top Inventors for class "Railways" | |
| Rank | Inventor's name |
|---|---|
| 1 | David W. Crawford |
| 2 | Qinghua Zheng |
| 3 | Edward A. Nemeth |
| 4 | Eric S. Cylvick |
| 5 | Robert S. Miller |