Patent application title: TRAY SEALER
Inventors:
Albert Gabler (Wolfertschwenden, DE)
Assignees:
MULTIVAC SEPP HAGGENMULLER GMBH & CO. KG
IPC8 Class: AB65B716FI
USPC Class:
53329
Class name: Closing packages and filled receptacles separate closure applying closure securing means
Publication date: 2014-03-13
Patent application number: 20140069054
Abstract:
The invention relates to a tray sealer with a gripper system comprising a
pivot mechanism with vertically disposed pivot axles to move gripper arms
relative to each other and parallel to a transport plane.Claims:
1. Tray sealer comprising: a closing device; a collection belt; a
discharge belt; and a gripper system including: a transfer carriage;
guides for said transfer carriage; a linear actuator for driving said
transfer carriage along said guides; at least two gripper arms; a pivot
mechanism for pivoting said gripper arms, wherein said pivot mechanism
comprises vertically disposed pivot axles to move said gripper arms
relative to each other and in a plane parallel to a transport plane; and
a pivot drive for driving said pivot mechanism.
2. Tray sealer according to claim 1, wherein said pivot mechanism comprises at least one parallelogram linkage for each gripper arm.
3. Tray sealer according to claim 2, wherein said pivot axles are by a lever mechanism coupled to each other such that said parallelogram linkages can be moved synchronously.
4. Tray sealer according to claim 2, wherein a parallelogram linkage is connected to one end of a gripper arm.
5. Tray sealer according to claim 1, wherein said transfer carriage is drivable by said linear actuator using a toothed belt drive.
6. Tray sealer according to claim 1, wherein said pivot mechanism is drivable by said pivot drive using a first and a second shaft.
7. Tray sealer according to claim 6, wherein said vertically disposed pivot axles of said pivot mechanism can be driven by a rotation of the shafts and a lever mechanism provided on said transfer carriage.
8. Tray sealer according to claim 1, wherein said guides are provided downstream of said closing device in a direction of transport of said tray sealer.
9. Tray sealer according to claim 1, wherein said guides and said transfer carriage are provided below said transport plane.
10. Tray sealer according to claim 1, wherein said linear actuator and/or said pivot drive comprise a servo motor.
11. A gripper system for a packaging machine, said gripper system comprising: a transfer carriage; guides for said transfer carriage; a linear actuator for driving said transfer carriage along said guides; at least two gripper anus; a pivot mechanism for pivoting said gripper arms, wherein said pivot mechanism comprises vertically disposed pivot axles to move said gripper arms relative to each other and in a plane parallel to a transport plane; and a pivot drive for driving said pivot mechanism.
Description:
CROSS-REFERENCE TO RELATED APPLICATIONS
[0001] This Application claims priority to European Application Number 12006350.8 filed Sep. 9, 2012, to Albert Gabler entitled "Tray Sealer," currently pending, the entire disclosure of which is incorporated herein by reference.
FIELD OF THE INVENTION
[0002] The invention relates to a tray sealer (i.e., a tray sealing packaging machine).
BACKGROUND OF THE INVENTION
[0003] A tray sealer is known from EP 2 141 095 A1, in which a transfer carriage moves along guides in the direction of transport, and a motion of the gripper arms relative to each other is generated by a rotational motion of the guides.
[0004] A tray sealer is known from EP 0 334 266, in which two transfer carriages are arranged laterally below a conveyor belt conveying the trays to a sealing station, and gripper arms are moved towards each other for receiving trays using a pivot lever on each transfer carriage on which a gripper aim is mounted.
[0005] A tray sealer is known from EP 1 996 470 in which a gripper system with a carriage, a pivot mechanism, and two gripper arms is provided above the transport plane for the trays and a speed difference between the drive of the carriage and a drive for the pivoting mechanism provides for the movement of the gripper arms towards each other.
[0006] A common disadvantage of the above-described tray sealers according to prior art is that the gripper arms are moved towards each other not in parallel, and not at a fixed distance from the transport plane for the trays. Depending on the size of the trays, the gripper arms are moved to a different distance towards each other for receiving the trays and thereby have differing heights relative to the transport plane and thus relative to the tray bottom. Due to a collision with the gripper arms and the sealing tool lower part during the closing motion and the resulting vertical motion, it is hardly possible to grip shallow trays. Due to the lateral dimension of the sealing tool lower part and/or the sealing tool upper part and a limited reach of the gripper arms, narrow trays can only be gripped when the sealing tool lower part and/or the sealing tool upper part with smaller lateral dimensions and adapted gripper arms are simultaneously replaced, in order to be able to move the gripper arms closer to each other.
[0007] WO 2011/018 391 shows a tray sealer with horizontal gripper arm adjustment at a transfer carriage being arranged above the transport plane, where drives riding along with the transfer carriage are provided for the gripper arm adjustment. Such a tray sealer has the drawback that the swing of the gripper arms is limited by the guides provided horizontally and transversely to the direction of transport, and that the inertial mass of the transfer carriage is large due to the drives riding along for the gripper arm adjustment.
SUMMARY OF THE INVENTION
[0008] It is the object of the present invention to provide a tray sealer with a gripper system that no longer has the drawbacks mentioned.
[0009] The tray sealer according to one embodiment of the present invention comprises a closing device, a collection belt, a discharge belt and a gripper system, wherein the gripper system comprises a transfer carriage, guides for the transfer carriage, a linear actuator for driving the transfer carriage, at least two gripper arms, a pivot mechanism for the gripper arms and a pivot drive for driving the pivot mechanism. The pivot mechanism can include vertically disposed pivot axles to move the gripper arms relative to each other and in a plane parallel to a transport plane of trays to be conveyed. This has the advantage that the gripper arms firstly can be at only a very small distance to the transport plane in order to also grip shallow trays. Secondly, a greater lifting motion and a more space-saving design compared to the prior art is possible because the pivot axles are arranged vertically. The support of the pivot axles allows for a very small footprint adjacent to the discharge belt or of the collection belt.
[0010] In one embodiment, the pivot mechanism comprises at least one parallelogram linkage for each gripper arm in order to allow a relative motion of the gripper arms to one another during which the gripper arms are permanently oriented in the direction of transport or parallel to each other, respectively.
[0011] The transfer carriage can be driven by the linear actuator using a toothed belt drive to minimize the inertia of the moving masses of the gripper system.
[0012] The pivot mechanism may be driven by the pivot drive using a first and a second shaft to be able to attach the pivot drive to a machine frame in a stationary manner. This also reduces the moving mass of the gripper system and this embodiment requires less maintenance than a co-moving drive with mechanically stressed power lines.
[0013] The vertically disposed pivot axles of the pivot mechanism can be driven by a rotation of the shafts and a lever mechanism provided on the transfer carriage. Depending on the distance of the shafts to each other, high torques can be transmitted from the pivot drive to the pivot mechanism or to the parallelogram linkages, respectively, and thereby to the gripper arms.
[0014] The guides for the transfer carriage are provided preferably in the direction of transport downstream of the sealing station, in order to increase the hygienic quality, in that as few components as possible are disposed upstream of the still unsealed trays, for example, on the collection belt on which the trays with the product are open at the top, so that the risk of contamination of the products prior to closing is reduced.
[0015] Preferably, the guides and the transfer carriage are provided below the transport plane in order to increase the hygienic quality in that as few components as possible are disposed above the still unsealed trays, for example, on the collection belt.
[0016] In one embodiment, the linear actuator and/or the pivot drive comprise a servo motor to reach a highly dynamic range, and to be able to have the two drives be able to perform motions relative to each other with very high accuracy, which is advantageous for the closing motion of the gripper arms. Unlike pneumatic cylinders, all intermediate positions are possible with servo motors during the gripper arm motion.
[0017] The pivot axles can be coupled to each other via a lever mechanism such that the parallelogram linkages can be moved synchronously, so that the position of the gripper arms is always centered relative to the closing device or to the trays, respectively.
[0018] The gripper arms may be connected to the parallelogram linkage with one of their ends. In this manner, only the gripper arms protrude into the closing device and the transfer carriage with the pivot mechanism moves outside of the closing device. Accordingly, the closure device can be embodied in a space-saving manner.
[0019] Other and further objects of the invention, together with the features of novelty appurtenant thereto, will appear in the course of the following description.
DESCRIPTION OF THE SEVERAL VIEWS OF THE DRAWING
[0020] In the accompanying drawing, which forms a part of the specification and is to be read in conjunction therewith in which like reference numerals are used to indicate like or similar parts in the various views:
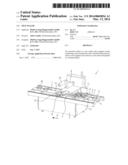
[0021] FIG. 1 is a side perspective view of a tray sealer in accordance with one embodiment of the present invention;
[0022] FIG. 2a is plan view of a gripper system in the open position in accordance with one embodiment of the present invention;
[0023] FIG. 2b is a plan view of the gripper system of FIG. 2a in the closed position for gripping the trays from the feeding belt and a closing device;
[0024] FIG. 2c is a plan view of the gripper system of FIG. 2a after a motion in the direction of transport;
[0025] FIG. 2d is a plan view of the gripper system of FIG. 2a in the open position for placing trays in the closing device and onto the discharge belt;
[0026] FIG. 3 is a side perspective view of a gripper system as a separate module in accordance with one embodiment of the present invention;
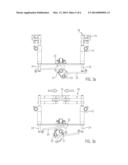
[0027] FIG. 3a is a sectional view of the gripper system of FIG. 3 from a direction opposite to the direction of transport in a first position;
[0028] FIG. 3b is a sectional view of the gripper system of FIG. 3 from a direction opposite to the direction of transport in a second position;
[0029] FIG. 4a is a plan view of the gripper arms and the pivot mechanism in the open position in accordance with one embodiment of the present invention;
[0030] FIG. 4b is a plan view of the gripper arms and the pivot mechanism of FIG. 4a in an intermediate position; and
[0031] FIG. 4c is a plan view of the gripper arms and the pivot mechanism of FIG. 4a in the closed position.
[0032] Identical components are throughout the figures designated with the same reference numerals.
DETAILED DESCRIPTION OF THE INVENTION
[0033] The invention will now be described with reference to the drawing figures, in which like reference numerals refer to like parts throughout. For purposes of clarity in illustrating the characteristics of the present invention, proportional relationships of the elements have not necessarily been maintained in the drawing figures.
[0034] The following detailed description of the invention references specific embodiments in which the invention can be practiced. The embodiments are intended to describe aspects of the invention in sufficient detail to enable those skilled in the art to practice the invention. Other embodiments can be utilized and changes can be made without departing from the scope of the present invention. The present invention is defined by the appended claims and the description is, therefore, not to be taken in a limiting sense and shall not limit the scope of equivalents to which such claims are entitled.
[0035] FIG. 1 shows a perspective view of a tray sealer (i.e., a tray sealing packaging machine) 1 according to one embodiment of the present invention. The tray sealer 1 comprises a machine frame 2 on which a closing device 3 (e.g., a sealing station) is arranged for closing and possibly for sealing and/or evacuating and/or gas flushing supplied trays 4, as well as for cutting a top film--not shown--used for closing. As show, the packaging machine 1 further comprises a conveyor belt 5 and a collection belt 6 for supplying the trays 4 filled with the product, a discharge belt 7 for conveying the sealed trays 4a away, a film feeder roller 9 for taking up and delivering a top film, and a film trim winder 10 for winding the film sheet of the top film that remains after the sealing process. A display 11 allows the operator of the tray sealer 1 to monitor and control the operation of the tray sealer 1. A gripper system 12 can comprise a transfer carriage 13, a pivot mechanism 14 and two gripper arms 15. The motion of the gripper system 12 in and against a direction of transport R can be performed from the collection belt 6 into the closing device 3 for introducing unclosed trays 4, and is performed from the closing device 3 onto the discharge belt 7 for extracting the closed trays 4a. The transport surfaces of the belts 6, 7, 8 for the trays 4, 4a define the horizontal transport plane E.
[0036] The mode of operation of the gripper system 12 shall be explained using FIGS. 2a to 2d. FIG. 2a shows a plan view of a gripper system 12 in the open position. The transfer carriage 13 can be movable in the direction of transport R using guides 16 and is driven by a linear actuator 17 (see FIG. 3). The transfer carriage 13 has a pivot mechanism 14 attached (see FIG. 3) which can comprise a parallelogram linkage 18 for each gripper 15. A pivot drive 19 (see FIG. 3) may be provided for closing and opening the gripper arms 15.
[0037] After opening the sealing device 3, as shown in FIG. 2b, the gripper arms 15 perform a closing motion towards each other in a horizontal plane and grip two trays 4a which were closed with a top film, and two trays 4 which were provided on the collection belt 6.
[0038] The transfer carriage 13 can move in the direction of transport R in order to convey the trays 4 from the collection belt 6 into the closing device 3, and the closed trays 4a from the closing device 3 via the discharge belt 7, as shown in FIG. 2c. The motions are illustrated by arrows.
[0039] FIG. 2d illustrates how the gripper arms 15 are moved apart, so that the trays 4a can be conveyed away on the discharge belt 7 to a next production step, and the new trays 4 can be closed in the closing device 3. This cycle starts over again after the transfer carriage 13 has been moved back in the direction opposite to the direction of transport R.
[0040] FIG. 3 shows a perspective view of the gripper system 12 as a separate module without the guides 16, but with the transfer carriage 13, the linear actuator 17 and the pivot drive 19 for the closing motion of the gripper arms 15. The linear actuator 17 is attached in a stationary manner to the machine frame 2 and may move the transfer carriage 13 along the guides 16--presently not shown--using a toothed belt drive 20. Alternatively, also flat belts, chains or a spindle drive can be used. The pivot drive 19 is also mounted in a stationary manner on the machine frame 2 and rotates a first shaft 21. By using levers 22 provided at the ends of the first shaft 21, a second shaft 23 may be rotated about the first shaft 21 in order to be able to transmit a torque to the pivot mechanism 14, while the pivot mechanism 14 is guided along the two shafts 21, 23.
[0041] As is shown in FIGS. 3a and 3b in a sectional view, the pivot drive 19 can provide a torque transfer, via the two shafts 21, 23 and the lever 22 by using a lever mechanism 25, onto each of the pivot axles 24 of the parallelogram linkage 18, which are in the transfer carriage 13 rotatably mounted. The parallelogram linkage 18 ensures that the gripper arms 15 aligned in parallel to the direction of transport R also move in parallel to each other during the opening and closing motion in order to be able to precisely grip the trays 4, 4a. The rotational motion of the lever 22 and the closing of the gripper aims 15 are shown by arrows in FIG. 3b.
[0042] The relationship of the motions of the transfer carriage 13 and the gripper arms 15 is explained using FIGS. 4a, 4b and 4c. FIG. 4a shows a plan view of a gripper system 12 in the open position. During the closing motion of the gripper arms 15 for gripping the trays (presently not shown), the gripper aims 15 must maintain their position relative to the direction of transport R. During the pivot motion of the parallelogram linkage 18, there is a relative motion of the gripper arms 15 vis-a-vis the transfer carriage 13. This relative motion can be compensated by a motion by the transfer carriage 13. This means that the linear actuator 17 (see FIG. 3) during the closing motion of the gripper arms 15 is coupled to the pivot drive 19 (see FIG. 3), for example, via a common controller, in a manner that such a closing motion of the gripper aims 15 is enabled. Servo motors can be provided for the linear actuator 17 and the pivot drive 19. Furthermore, FIGS. 4a and 4c show that the space required for the pivot mechanism 14, in particular of the parallelogram linkage 18, is small while it is still possible to grip both very narrow trays 4 as well as very wide trays 4 without having to make any modifications to the gripper system 12. Flexibility is thereby increased and set-up times are reduced.
[0043] It is also conceivable that the transfer carriage 13 and the guides 16 are provided below the collection belt 6. FIGS. 1 to 4c show a single lane tray sealer 1 for the simultaneous closing of two trays 4. The tray sealer 1 according to the invention can also be embodied as a multi-track tray sealer 1 and is conceivable for any number of trays 4.
[0044] From the foregoing, it will be seen that this invention is one well adapted to attain all the ends and objects hereinabove set forth together with other advantages which are obvious and which are inherent to the structure. It will be understood that certain features and sub combinations are of utility and may be employed without reference to other features and sub combinations. This is contemplated by and is within the scope of the claims. Since many possible embodiments of the invention may be made without departing from the scope thereof, it is also to be understood that all matters herein set forth or shown in the accompanying drawings are to be interpreted as illustrative and not limiting.
[0045] The constructions and methods described above and illustrated in the drawings are presented by way of example only and are not intended to limit the concepts and principles of the present invention. Thus, there has been shown and described several embodiments of a novel invention. As is evident from the foregoing description, certain aspects of the present invention are not limited by the particular details of the examples illustrated herein, and it is therefore contemplated that other modifications and applications, or equivalents thereof, will occur to those skilled in the art. The terms "having" and "including" and similar terms as used in the foregoing specification are used in the sense of "optional" or "may include" and not as "required". Many changes, modifications, variations and other uses and applications of the present construction will, however, become apparent to those skilled in the art after considering the specification and the accompanying drawings. All such changes, modifications, variations and other uses and applications which do not depart from the spirit and scope of the invention are deemed to be covered by the invention which is limited only by the claims which follow.
User Contributions:
Comment about this patent or add new information about this topic:
Images included with this patent application:
 |  |
 |  |
 |  |
 |
| New patent applications in this class: | |
| Date | Title |
|---|---|
| 2015-02-26 | Tool handling system |
| 2015-02-05 | Machine for applying threaded caps to containers |
| 2014-02-20 | Card sealing fixture and method of making same |
| 2013-03-28 | Carrier tape winding unit and apparatus of packing semiconductor package |
| 2012-04-12 | Sealing station and method for cutting a cover film |
| New patent applications from these inventors: | |
| Date | Title |
|---|---|
| 2015-03-26 | Tray sealer with exchangeable belt body |
| 2014-07-03 | Packaging machine with a protective device and method |
| 2013-10-03 | Multi-row sealing station |
| Top Inventors for class "Package making" | |
| Rank | Inventor's name |
|---|---|
| 1 | Donald E. Weder |
| 2 | Dennis J. May |
| 3 | Samuel D. Griggs |
| 4 | Patrick R. Lancaster, Iii |
| 5 | Giuseppe Monti |