Patent application title: Systems and Methods for Directional Pulsed-Electric Drilling
Inventors:
Ronald J. Dirksen (Spring, TX, US)
Ronald J. Dirksen (Spring, TX, US)
Assignees:
HALLIBURTON ENERGY SERVICES, INC.
IPC8 Class: AE21B704FI
USPC Class:
175 16
Class name: Boring or penetrating the earth boring by directly applying heat to fluidize or comminute electrically produced heat
Publication date: 2013-02-07
Patent application number: 20130032399
Abstract:
Pulsed-electric drilling systems can be augmented with a steering
mechanism that shifts at least a portion of a bit relative to a borehole
centerline. Illustrative mechanisms include ball-and-socket joints,
pivot-and-hinge joints, rotary steerable systems, and bent subs. As the
bit detaches formation material using electric pulses, the detached
material being flushed away by a flow of drilling fluid, the shifting of
the bit from the centerline causes the borehole to turn in the direction
of the bit.Claims:
1. A steerable pulsed-electric drilling system that comprises: a bit that
extends a borehole by detaching formation material with pulses of
electric current; a drillstring that defines at least one path for a
fluid flow to the bit to flush detached formation material from the
borehole; and a steering mechanism that causes at least a portion of the
bit to shift relative to a centerline of the borehole.
2. The system of claim 1, wherein the steering mechanism comprises a ball-and-socket joint.
3. The system of claim 1, wherein the steering mechanism comprises a rotary steerable system.
4. The system of claim 1, wherein the steering mechanism comprises a hinge joint.
5. The system of claim 1, further comprising an orientation unit attached to the drillstring near the bit.
6. The system of claim 5, wherein the orientation unit includes sensors for determining orientation of the unit relative to a geomagnetic field.
7. The system of claim 5, wherein the orientation unit includes accelerometers for determining orientation of the unit relative to gravity.
8. The system of claim 5, wherein the orientation unit includes inertial or gyroscopic sensors for estimating a position of said unit.
9. The system of claim 1, wherein the steering mechanism is electrically powered.
10. The system of claim 1, wherein the steering mechanism is hydraulically powered.
11. A steerable pulsed-electric drilling method that comprises: extending a borehole with a bit that detaches formation material using pulses of electric current; flushing detached formation material from the borehole with a fluid flow through a drillstring attached to the bit; and shifting at least a portion of the bit relative to a centerline of the borehole to steer the extending of the borehole.
12. The method of claim 11, wherein said shifting includes flexing a ball-and-socket joint.
13. The method of claim 11, wherein said shifting employs a rotary steerable system.
14. The method of claim 11, wherein said shifting includes flexing a hinge joint.
15. The method of claim 11, wherein said shifting includes determining a present orientation of the bit using an orientation unit attached to the drillstring near the bit.
16. The method of claim 15, wherein the orientation unit includes sensors for determining orientation of the unit relative to a geomagnetic field.
17. The method of claim 15, wherein the orientation unit includes accelerometers for determining orientation of the unit relative to gravity.
18. The method of claim 15, wherein the orientation unit includes inertial or gyroscopic sensors for estimating a position of said unit.
19. The method of claim 11, further comprising altering a firing pattern of pulses from said bit to favor a higher frequency on an inside of a curve.
Description:
RELATED APPLICATIONS
[0001] The present application claims priority to U.S. application Ser. No. 61/514,304, titled "Systems and Methods for Directional Pulsed Electric Drilling" and filed Aug. 2, 2011 by Ron Dirksen. The present application further relates to co-pending U.S. application Ser. No. 13/564,230 (Atty Dkt 1391-848.02), titled Pulsed-electric drilling systems and methods with formation evaluation and/or bit position tracking" and filed Aug. 1, 2012, by Burkay Donderici and Ron Dirksen. Both of the foregoing references are hereby incorporated herein by reference.
BACKGROUND
[0002] There have been recent efforts to develop drilling techniques that do not require physically cutting and scraping material to form the borehole. Particularly relevant to the present disclosure are pulsed electric drilling systems that employ high energy sparks to pulverize the formation material and thereby enable it to be cleared from the path of the drilling assembly. Such systems are at illustratively disclosed in; U.S. Pat. No. 4,741,405, titled "Focused Shock Spark Discharge Drill Using Multiple Electrodes" by Moeny and Small; WO 2008/003092, titled "Portable and directional electrocrushing bit" by Moeny; and WO 2010/027866, titled "Pulsed electric rock drilling apparatus with non-rotating bit and directional control" by Moeny. Each of these references is incorporated herein by reference.
[0003] Generally speaking, the disclosed drilling systems employ a bit having multiple electrodes immersed in a highly resistive drilling fluid in a borehole. The systems generate multiple sparks per second using a specified excitation current profile that causes a transient spark to form and arc through the most conducting portion of the borehole floor. The arc causes that portion of the borehole floor to disintegrate or fragment and be swept away by the flow of drilling fluid. As the most conductive portions of the borehole floor are removed, subsequent sparks naturally seek the next most conductive portion.
[0004] These systems have the potential to make the drilling process faster and less expensive. However, they exhibit marked differences from traditional drilling systems and may lack many of the capabilities of such systems. As just one example, traditional drilling systems are now able steer boreholes along a desired path and for quite some distance from the well head. The proposed pulsed electric drilling systems appear to be quite limited in this way.
BRIEF DESCRIPTION OF THE DRAWINGS
[0005] Accordingly, there are disclosed herein in the drawings and detailed description specific embodiments of directional pulsed-electric drilling systems and methods. In the drawings:
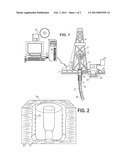
[0006] FIG. 1 shows an illustrative logging-while-drilling (LWD) environment.
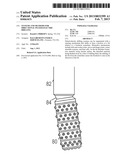
[0007] FIG. 2 is a detail view of an illustrative drill bit.
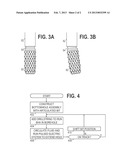
[0008] FIGS. 3A-3B shows a steerable pulsed-electric bit.
[0009] FIG. 4 is a flowchart of an illustrative directional pulsed electric drilling method.
[0010] It should be understood, however, that the specific embodiments given in the drawings and detailed description do not limit the disclosure. On the contrary, they provide the foundation for one of ordinary skill to discern the alternative forms, equivalents, and modifications that are encompassed in the scope of the appended claims.
DETAILED DESCRIPTION
[0011] The disclosed embodiments can be best understood in the context of their environment. Accordingly, FIG. 1 shows a drilling platform 2 supporting a derrick 4 having a traveling block 6 for raising and lowering a drill string 8. A drill bit 26, which may be part of a pulsed-electric drilling system as patented by Tetra (see references cited in background), is powered via a wireline cable 30 to extend borehole 16. Power to the bit is provided by a power generator and power conditioning and delivery systems to convert the generated power into multi-kilovolt DC pulsed power required for the system. This would likely be done in several steps, with high voltage cabling being provided between the different stages of the power-conditioning system. The power circuits will generate heat and will likely be cooled during their operation to sustain operation for extended periods.
[0012] Recirculation equipment 18 pumps drilling fluid from a retention pit 20 through a feed pipe 22 to kelly 10, downhole through the interior of drill string 8, through orifices in drill bit 26, back to the surface via the annulus around drill string 8, through a blowout preventer and along a return pipe 23 into the pit 20. The drilling fluid transports cuttings from the borehole into the pit 20, cools the bit, and aids in maintaining the borehole integrity. A telemetry interface 36 provides communication between a surface control and monitoring system 50 and the electronics for driving bit 26. A user can interact with the control and monitoring system via a user interface having an input device 54 and an output device 56. Software on computer readable storage media 52 configures the operation of the control and monitoring system.
[0013] The feed pipe 22 may optionally be equipped with a heat exchanger 17 to remove heat from the drilling fluid, thereby cooling it before it enters the well. A refrigeration unit 19 may be coupled to the heat exchanger 17 to facilitate the heat transfer. As an alternative to the two-stage refrigeration system shown here, the feed pipe 22 could be equipped with air-cooled radiator fins or some other mechanism for transferring heat to the surrounding air. It is expected, however, that a refrigerant vaporization system would be preferred for its ability to remove heat efficiently even when the ambient temperature is elevated.
[0014] FIG. 2 shows a close-up view of an illustrative formation 60 being penetrated by drill bit 26. Electrodes 62 on the face of the bit provide electric discharges ("sparks", or "arcs") to extend the borehole 16. In at least some "forward circulation" embodiments, a high-permittivity fluid drilling fluid flows from the bore of the drill string through one or more ports in the bit to pass around the electrodes and return along the annular space around the drill string. ("Reverse circulation" embodiments reverse the fluid flow direction.) The fluid serves to communicate the discharges to the formation and to cool the bit and clear away the debris.
[0015] For pulsed-electric drilling systems to compete with or replace conventional rotary drilling systems, it is desirable for these systems to be capable of drilling directional wells. Traditionally, directional drilling systems have very limited turn radii (on the order of a few thousand feet), but pulsed electric drilling systems need not be so limited. So long as the drill string is able to keep the bit in contact with the bottom of the borehole, the sole limiting factor is the turning performance of the bit. One way to provide a high degree of directional drilling control is to vary the angle of the bit relative to the centerline of the hole so as to direct the drilling device in the direction and at the build/turn rate required to achieve the directional wellbore intended to be drilled.
[0016] Envisioned here is an electrically powered ball and socket arrangement similar to a robotic arm joint that will allow movement in all directions with angles up to 90 degrees off the hole angle, however other arrangements can be easily incorporated. For example, a pivot-and-hinge joint (used herein to refer to a pivot joint that enables relative rotation about a longitudinal axis of the drill string, closely connected to a hinge joint that enables the bit to be angled relative to the borehole axis) can be used, and electrically powered motors can be replaced with hydraulics. The system is controlled either by an operator at surface, or by autonomous systems in the drilling system that make the drilling system follow a pre-determined well profile, or anything in between these two options.
[0017] FIGS. 3A and 3B show an illustrative bit 80 coupled to a drill string 82 by a ball and socket joint 84. The joint can have internal servos that control the bit's orientation relative to the drill string axis. Because the face of the bit is angled relative to the centerline of the borehole, the borehole created by the drill bit curves, enabling the drill string to be steered in accordance with geosteering techniques known in the industry.
[0018] To enhance the turn rate, the bit discharges may be driven in an asymmetric fashion, with the electrodes on the outside of the curve being turned off or at least driven less frequently than the electrodes on the inside of the curve. The electrodes transverse to the bit axis (e.g., those on the forward face of the bit) can continue to be driven in the usual fashion.
[0019] The drill string may include an orientation unit in close proximity to the bit. An orientation unit tracks the current orientation of the bottomhole assembly, and in some cases, may also track the position of the bottomhole assembly. The orientation can be accurately determined using a combination of a multi-axis accelerometer (to measure the direction of gravity) and a multi-axis flux-gate magnetometer (to measured the direction of the geomagnetic field), from which it is possible to determine the bottomhole assembly's inclination (deviation from vertical) and azimuth (deviation from north). Other gravity sensors and magnetic field sensors are known and can be used for this purpose.
[0020] The position of the bottomhole assembly can be tracked through the use of gyroscopes and/or inertial tracking systems, alone or in combination with external measurements of, e.g., drill string length or bit position derived from surface measurements. Illustrative surface measurements may include a seismic sensing array or an electromagnetic sensing array to detect bit activity and triangulate the location. Alternatively, the bit position can be inferred by combining the length evolution of the drill string with the tracked orientation information from the orientation unit.
[0021] The driller may take a desired well profile as a reference for comparison with the current position and orientation of the bottomhole assembly and, based on this comparison, may alter the angle of the bit in the desired direction by an amount shown to provide the desired build/turn rate of the deviation from the present hole direction. The angling device can be made in a variety of ways and, as torque or weight on bit considerations are of limited concern in pulsed-electric drilling systems (in contrast to rotary drilling systems), the design can be made efficiently to take much less space. That is, the design need not be "over-engineered" to ensure robustness, as the steering device reliability is expected to be significantly higher than those in existing rotary systems.
[0022] Nevertheless, it is expected that there will be applications for existing steering systems in a pulsed-electric drilling system. For example, in long-reach wells it will likely be desirable to rotate the drill string during the drilling process to reduce friction and improve circulation. In such systems, a rotary-steerable system may be adapted for use in a pulsed-electric drilling system to keep the bit pointed at a desired orientation as the bit rotates. In other system embodiments, a bent-sub can be used to position the bit at a fixed deviation from the borehole centerline, with steering accomplished by rotating the bit so that on average the deviation is zero when straight-ahead drilling is desired, and halting rotation when it is desired to drill a curve.
[0023] FIG. 4 is a flowchart of an illustrative directional pulsed electric drilling method. Beginning in block 402, the driller constructs a bottomhole assembly that, together with the driving electronics for the pulsed-electric bit, the telemetry system, and the logging-while-drilling (LWD) instrumentation (preferably including an orientation unit), further includes a steering mechanism that articulates at least a portion of the bit relative to the centerline of the borehole. In some embodiments, the bit is coupled to the drill string by a powered joint such as a ball-and-socket joint or a pivot-and-hinge joint. In other embodiments, a bit-face portion of the bit can be angled relative to the rest of the bit.
[0024] In block 404, the driller runs the bottomhole assembly into the borehole by attaching and extending the drill string. The drill string can consist of a connected series of threaded tubulars, with the driller adding a new tubular as needed to extend the drill string length. Alternatively, the drill string can consist of continuous (composite or steel) tubing which is pulled from a reel of tubing as needed to extend the length of the drill string in the borehole.
[0025] Once the bottomhole assembly contacts the bottom of the borehole, the driller in block 406 begins the active drilling phase, circulating drilling fluid and generating electrical pulses to extend the length of the borehole. The driller may also collect LWD measurements including orientation and/or position of the bottomhole assembly during the drilling process. In block 408, the driller determines whether the borehole is following the desired path, e.g., by comparing the tool orientation and/or position to that associated with a desired well profile. Alternatively, the driller may make steering decisions on the fly based on measurements of the formation properties surrounding and ahead of the bottomhole assembly. Such measurements may indicate desirable or undesirable formations for the borehole to follow or avoid. Based on such information, the driller can decide to adjust the bit orientation relative to the centerline of the borehole (block 410) or to continue with the current setting, after which the process repeats blocks 404-410 until the target depth is reached.
[0026] Accordingly, there has been disclosed herein pulsed electric drilling systems and methods having steering mechanisms incorporated into the bottomhole assembly. The disclosed systems may employ a pulsed electric drilling system such as that disclosed by Moeny in the references cited in the background section, but enhanced with a bit that can be articulated or tilted off-axis in some fashion to enhance the bit's directional drilling performance. As explained herein it is believed that angling of the bit will provide a much higher turning rate for the borehole than previous methods.
[0027] These and other variations, modifications, and equivalents will be apparent to one of ordinary skill upon reviewing this disclosure. It is intended that the following claims be interpreted to embrace all such variations and modifications where applicable.
User Contributions:
Comment about this patent or add new information about this topic:
Images included with this patent application:
 |  |
 |
| Similar patent applications: | |
| Date | Title |
|---|---|
| 2013-12-05 | Devices and methods for horizontal directional drilling with a boring tool library |
| 2013-12-05 | Systems and methods for detecting drillstring loads |
| 2013-12-05 | Drilling system, biasing mechanism and method for directionally drilling a borehole |
| 2013-12-05 | Control equipment for controlling drill rod |
| 2011-10-20 | Permanent magnet direct drive top drive |
| New patent applications from these inventors: | |
| Date | Title |
|---|---|
| 2015-10-22 | Assembly and method for subsea hydrocarbon gas recovery |
| 2013-04-25 | Systems and methods for killing a well |
| 2013-02-07 | Systems and methods for drilling boreholes with noncircular or variable cross-sections |
| 2013-02-07 | Pulsed-electric drilling systems and methods with formation evaluation and/or bit position tracking |
| 2013-02-07 | Cooled-fluid systems and methods for pulsed-electric drilling |
| Top Inventors for class "Boring or penetrating the earth" | |
| Rank | Inventor's name |
|---|---|
| 1 | David R. Hall |
| 2 | Anthony A. Digiovanni |
| 3 | Danny E. Scott |
| 4 | Youhe Zhang |
| 5 | Steven R. Radford |