Patent application title: Control Unit For An Electric Motor, In Particular For A Fan Motor
Inventors:
Andras Lelkes (Bad Durrheim, DE)
Assignees:
Papst Licensing GmbH & Co. KG
IPC8 Class: AH02P608FI
USPC Class:
31840042
Class name: Electricity: motive power systems synchronous motor systems brushless motor open-loop control
Publication date: 2012-10-11
Patent application number: 20120256576
Abstract:
The invention provides a control unit for at least one electric motor,
wherein the control unit performs open-loop or closed-loop control of the
motor speed of the electric motor in such a way that in the case of
control values in specific ranges which are typical of a fault when the
setpoint value is being predefined, such a fault being, for example, a
line break, a voltage failure or a short circuit, the control unit drives
the motor with a predefined setpoint value which differs from the current
control value.Claims:
1-14. (canceled)
15. A cooling fan, comprising: a housing; a brushless DC motor mounted in the housing; a fan wheel operatively engaged with a rotor of the brushless DC motor, wherein the fan wheel is adapted to rotate when the brushless DC motor is operated in order to create a flow of cooling air; a motor controller mounted in the housing in a fixed relationship with the brushless DC motor, wherein the motor controller is adapted (a) to cause the rotor and the fan wheel to rotate at a nonzero speed if the magnitude of a control signal is in a range of values associated with a fault condition and (b) to stop rotation of the rotor and the fan wheel if the control signal is between a nonzero first threshold value and a second threshold value greater than the first threshold value.
16. The cooling fan of claim 15, wherein the range of values associated with the fault condition is a range from zero to the first threshold value.
17. The cooling fan of claim 15, wherein the control signal is one of a pulse-width modulated signal and a voltage.
18. The cooling fan of claim 15, wherein control signal is an analog voltage signal.
19. The cooling fan of claim 18, wherein the range of values associated with a fault condition includes a value that represents one of zero volts and a voltage identical to a supply voltage.
20. The cooling fan of claim 15, wherein the control signal is a modulated signal and the range of values associated with a fault includes a value associated with a signal modulated 0% and a value associated with a signal modulated 100%.
21. The cooling fan of claim 15, comprising an analog-to-digital converter adapted to convert an analog control signal into a digital control signal.
22. The cooling fan of claim 15, wherein the first threshold value is one of 0.5 volts and 5% modulation.
23. The cooling fan of claim 22, wherein the second threshold value is one of 1 volt and 10% modulation.
24. The cooling fan of claim 23, comprising a further circuit to generate a warning signal if the control value indicates a fault.
25. The cooling fan of claim 24, wherein the further circuit generates one of a visual warning signal, an audible warning signal, and a combination thereof.
Description:
CROSS-REFERENCE TO RELATED APPLICATION
[0001] The present application is a continuation of U.S. patent application Ser. No. 12/299,426, which was filed on Nov. 30, 2008, and is the U.S. National Stage of International Patent Application No. PCT/EP2007/054301, filed on May 3, 2007, which in turn claims priority to German Patent Application No. 20 2006 007 136.9, filed May 4, 2006. The entire text of all of the above-listed applications are hereby incorporated herein by reference in their entireties.
DESCRIPTION
[0002] The invention relates to a control unit for an electric motor. Such control units are used to perform open-loop or closed-loop control of the motor speed. In many cases, in particular in fan applications, the motor speed is lowered according to demand in order to reduce the consumption of electric power. In the case of a fan, not only the power demand but also the flow noise are highly dependent on the motor speed. Referring to FIG. 8A and FIG. 1, FIG. 1 shows the shaft power output (1) of the fan motor 100 and the flow noise (2) of the fan 106 as a function of the motor speed. The torque demand of a fan wheel 106 increases to the power of two of the motor speed. As a result, the shaft power output of the motor 100 even increases to the power of three of the motor speed. This means that, for example, at half the motor speed the output power of the motor 100 only reaches 12.5% of the rated power. The shaft power output even drops below 1% if the motor speed is less than 21.5% of the rated motor speed. The flow noise (2) has been found empirically to drop to 15-17 dB(A) when the motor speed is halved.
[0003] In addition to the energy demand, the noise can therefore also be significantly reduced if motor-speed-controlled fan motors are used and if open-loop control of the motor speed and therefore of the air line is performed according to demand. The motor speed of a fan can be influenced in different ways as a function of the types of motor used. In the case of direct current motors, open-loop control of the motor speed is performed by means of the motor voltage. The control unit can predefine the motor voltage with a clocked voltage converter (chopper) or by means of a controlled rectifier. For universal motors, the amplitude of the alternating voltage can be set by means of a phase angle controller. In the case of a brushless motor (also referred to as BLDC or electronically commutated motor, referred to as EC motor), the control unit performs the electronic commutation. The control unit can additionally influence the motor voltage and as a result the motor speed through corresponding clocking of the transistors in the commutation electronics. In the case of asynchronous motors, either the frequency and the amplitude of the motor voltage are predefined with a frequency converter, or in the case of cost-effective systems, in particular in the case of fan drives, only the motor voltage is changed, for example, by means of a phase angle controller (referred to as slip controller).
[0004] The desired motor speed is usually defined by means of superimposed open-loop control. The setpoint value of the motor speed is often transmitted with an analogue value (for example 0-10 V) or with a pulse-width-modulated, digital value (PWM). FIG. 2 shows an input characteristic which is typical of fan applications. In this example, the superimposed controller has to output 0-10% of the control signal (x) for the motor to be stationary (nsetp=0). A disadvantage of this method is that in the case of faults, for example in the case of a line break or a short circuit in the control line, the fan can stop. In this case, it is not possible to ensure sufficient cooling, which may lead to a failure of the system. As a result, considerable material damage may occur and large losses due to a failure of production.
SUMMARY OF THE INVENTION
[0005] The present invention is therefore based on the object of configuring the input characteristic of the control unit in such a way that in the case of such a fault the motor continues to operate with a predefined motor speed. In the case of a fault such as a line break or a short circuit in the control line or in the case of the failure of the superimposed controller, the probability is high that the control signal x will record the value 0% or 100%.
[0006] According to the invention, the customary input characteristic is therefore changed according to FIG. 2 in such a way that in the case of input values in specific ranges, primarily approximately 0% or 100%, the controller drives the motor with a predefined setpoint value which differs from the current setpoint value.
[0007] In one advantageous embodiment, the controller additionally outputs a warning in the case of such a fault. This warning can be output by means of a visual or audible signal, by means of an analogue or digital electronic signal or by means of a commutation bus, for example, CAN bus.
BRIEF SUMMARY OF THE DRAWINGS
[0008] In the figures:
[0009] FIG. 1 shows the shaft output power of the fan motor and the flow noise of the fan as a function of the motor speed;
[0010] FIG. 2 shows an input characteristic which is typical of fan applications;
[0011] FIG. 3 shows the input characteristic of the control unit in an advantageous embodiment;
[0012] FIG. 4 shows the inventive input characteristic of the control unit if a setpoint value of nsetp=75% is used when such a fault is detected;
[0013] FIG. 5 shows the program sequence for implementing the input characteristic curve;
[0014] FIG. 6 shows a exemplary circuit;
[0015] FIG. 7 shows a further exemplary circuit with a warning output;
[0016] FIG. 8A is an isometric view of a fan that may be operated by a motor controlled by a control unit in accordance with present invention; and
[0017] FIG. 8B is an isometric view of a pump that may be operated by a motor controlled by a control unit in accordance with present with present invention.
DETAILED DESCRIPTION OF THE INVENTION
[0018] FIG. 3 shows the input characteristic of the control unit in an advantageous embodiment. In this example, the superimposed controller must output 5-10% of the control signal (x) instead of 0-10% in order to stop the motor. In the case of an analogue control signal (0-10 V) this means that in the case of a control voltage of 0.5 V to 1 V the motor is stationary (nsetp=0). A control voltage of less than 0.5 V indicates a fault (for example a failure of the superimposed controller, a line break or a short circuit in the control line). When a setpoint value is predefined with a PWM controlled digital signal, the motor will be stationary given a control signal of 5 to 10% PWM. A PWM factor of less than 5% means a fault. This is the case, for example, if the control signal is continuously at a low level (corresponds to 0% PWM). In this case, a predefined setpoint value of the motor speed is used. In FIG. 3, this value is for the fault nsetp=100%. For applications such as, for example, with fans, reliable operation is therefore ensured even in the case of a fault in the transferring of setpoint values. Although in fan applications, the power and noise are not reduced when such a fault occurs, sufficient cooling is ensured.
[0019] A setpoint value which differs from the maximum (100%) setpoint value of the motor speed can also be used in the event of a fault. In some cases, a reduced motor speed is sufficient for cooling in a normal situation, and the maximum motor speed (100%) is provided only for specific exceptional situations, for example for the failure of one of the fans which operate in parallel. FIG. 4 shows the inventive input characteristic of the control unit if a setpoint value of nsetp=75% is used for the detected fault. This value is therefore used if the control signal assumes x values in the ranges 0-5% and 95%-400%.
[0020] In order to implement an input characteristic curve according to FIG. 4, the analogue control signal can firstly be converted into a digital value using an analogue/digital converter. The signal is then further processed in digital form. In one advantageous refinement of the invention, this can be carried out by means of a programmable component such as a microprocessor, digital signal processor (DSP) or microcontroller. The programme sequence for implementing the input characteristic curve is illustrated in FIG. 5.
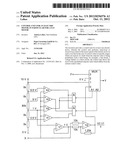
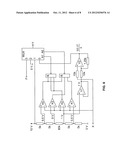
[0021] In a further refinement of the invention, the input characteristic curve is implemented using an electronic analogue circuit. FIG. 6 shows an exemplary circuit for this. This circuit is composed of four analogue comparators (K1 to K4), two operational amplifiers (V1, V2), two digital NAND gates, and of an analogue multiplexer (MUX). The comparators compare the control signal X with the voltage values at the discontinuities in the input characteristic according to FIG. 4, that is to say with 0.5 V, 1 V, 9 V and 9.5 V. These voltages are produced here from the 10 V supply voltage with a resistor series. The output signals of the comparators are further processed with the NAND gates and control the analogue multiplexer, as is shown by the following table.
TABLE-US-00001 Control signal X K4 K3 K2 K1 Al AO Y 0 . . . 0.5 V 1 1 F 0.5 . . . 1 V 1 0 0 V 1 . . . 9 V 0 0 9X - 1V/8 9 . . . 9.5 V 0 1 10 V 9.5 . . . 10 V 0 0 1 1 1 1 F
[0022] F is here the predefined setpoint value for the fault. If this value is, for example, 75%, as in FIG. 4, 7.5 V has to be connected here.
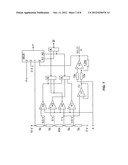
[0023] This circuit can be supplemented with a warning output (W), as illustrated in FIG. 7. In a normal situation this output supplies a logic "1" and in the case of a fault it supplies a logic "0". This warning is output if the control signal X assumes values lower than 0.5 V or higher than 9.5 V.
[0024] Referring to FIGS. 8A and 8B, the control unit 102 according to the invention can form a separate unit or can be integrated into the motor housing or into the terminal box of the motor 100 so that motor 100 and control unit 102 form one mechanical unit. The solution according to the invention can also advantageously be used in compact fans where control unit 102 and motor 100 are integrated parts of the compact fan. The solution according to the invention can, however, be used not only in fans, blowers and pumps 108 but also in any application in which in the event of a fault it is more favourable to operate the motor 100 with a predefined motor speed than to switch off the motor 100. Correspondingly, the invention is not only limited to the illustrated and described exemplary embodiments but rather also comprises all embodiments of like effect within the sense of the invention.
[0025] As one example, a brushless DC motor that incorporates aspects of the invention disclosed herein can be used to spin one or more hard disks in operative relation to at least one read/write head inside of a clean room environment that is manufactured to HDD industry contamination standards. As another example, the motors disclosed herein can be used to move storage media in other information storage devices such as, for example, an optical disk drive, a magneto-optical disk drive, a tape drive or a VCR.
User Contributions:
Comment about this patent or add new information about this topic:
Images included with this patent application:
 |  |
 |  |
 |  |
 |  |
 |
| Similar patent applications: | |
| Date | Title |
|---|---|
| 2014-05-15 | Control for multi-phase induction motor |
| 2014-05-22 | Apparatus and method for controlling motor driving and motor using the same |
| 2014-05-15 | Electric booster control apparatus and method |
| 2014-05-22 | Electric actuator drive device and actuator using same |
| 2014-05-22 | Current vector controlled synchronous reluctance motor and control method thereof |
| New patent applications in this class: | |
| Date | Title |
|---|---|
| 2016-04-28 | System and method for asynchronous permanent magnet motor operation |
| 2014-11-20 | Brushless motor, external ac voltage source, and electric power steering device |
| 2014-10-23 | Apparatus for differencing comparator and associated methods |
| 2014-09-18 | System and method for determining rotor shaft position of high voltage pm ac synchronous machines using auxiliary windings |
| 2014-09-18 | Load commutated inverter drive systems for high power drive applications |
| New patent applications from these inventors: | |
| Date | Title |
|---|---|
| 2013-05-23 | Control unit for an electric motor, in particular fora fan motor |
| 2009-04-09 | Control unit for an electric motor, in particular for a fan motor |
| Top Inventors for class "Electricity: motive power systems" | |
| Rank | Inventor's name |
|---|---|
| 1 | Steven E. Schulz |
| 2 | Silva Hiti |
| 3 | Yasusuke Iwashita |
| 4 | Brian A. Welchko |
| 5 | Kesatoshi Takeuchi |