Patent application title: Apparatus and Method for Steerable Drilling
Inventors:
John Gibb (Kuala Lumpur, MY)
Richard T. Hay (Spring, TX, US)
Richard T. Hay (Spring, TX, US)
Assignees:
HALLIBURTON ENERGY SERVICES, INC.
IPC8 Class: AE21B704FI
USPC Class:
175 61
Class name: Boring or penetrating the earth processes boring curved or redirected bores
Publication date: 2011-11-24
Patent application number: 20110284292
Abstract:
A method for drilling a wellbore comprises extending a rotatable drill
string in the wellbore, where the drill string has a bottom hole assembly
coupled to a bottom end thereof. A lower section of the bottom hole
assembly comprising a steering apparatus is coupled to an upper section
of the bottom hole assembly with a controllably adjustable clutch. A
steering apparatus toolface angle is detected. The clutch is controllably
adjusted to maintain the steering apparatus toolface angle within a
predetermined range about a target steering apparatus toolface angle
while rotating the upper section with the drill string.Claims:
1. An apparatus for drilling a wellbore comprising: a rotatable drill
string; a bottom hole assembly coupled to the drill string, the bottom
hole assembly comprising an upper section and a lower section, the lower
section comprising a drilling motor, and a steering apparatus having a
toolface reference; a sensor disposed in the bottom hole assembly to
provide at least a measure of the toolface angle; a controllably
adjustable clutch coupling the upper section to the lower section; and a
controller in data communication with the sensor and with the
controllably adjustable clutch, the controller adjusting the clutch to
maintain a steering assembly toolface angle in a predetermined range
about a target steering apparatus toolface angle while drilling.
2. The apparatus of claim 1 wherein the controller adjusts the clutch to maintain the steering apparatus toolface angle in the predetermined range about the target steering apparatus toolface angle while the upper section rotates with the drill string.
3. The apparatus of claim 1 wherein the controllably adjustable clutch comprises: a housing coupled to one of the upper section and the lower section; and a shaft rotatably supported by the housing, the shaft coupled to the other of the upper section and the lower section.
4. The apparatus of claim 3 further comprising a housing clutch plate engaged with the housing and a shaft clutch plate engaged with the shaft wherein an adjustable frictional force between the housing clutch plate and the shaft clutch plate controls the relative rotation between the upper section and the lower section.
5. The apparatus of claim 1 wherein the controller comprises a processor in data communications with a memory.
6. The apparatus of claim 5, wherein the processor acts according to programmed instructions stored in the memory to adjust a frictional force between a housing clutch plate and a shaft clutch plate based on a measurement of the toolface to maintain a target bent sub toolface within a predetermined toolface range.
7. The apparatus of claim 1 wherein the predetermined range is about .+-.45.degree. around the target toolface.
8. The apparatus of claim 1 wherein the sensor comprises a directional sensor package comprising at least one of: an inclinometer; a magnetometer; and a gyroscope.
9. The apparatus of claim 8 further comprising a reference sensor.
10. The apparatus of claim 8 wherein the directional sensor package is located in the bent sub.
11. The apparatus of claim 8 wherein the directional sensor package is located in the housing.
12. The apparatus of claim 8 wherein the directional sensor package is disposed in a measurement while drilling tool disposed in the lower section.
13. The apparatus of claim 1 wherein the drill string comprises a wired drill pipe section.
14. The apparatus of claim 1 wherein the steering apparatus is chosen from the group consisting of a bent sub and a steerable assembly.
15. The apparatus of claim 14 wherein the steerable assembly comprises at least one extendable member to cause the lower section to drill in a predetermined direction.
16. The apparatus of claim 14 wherein the steerable assembly comprises a controllably deflectable drilling shaft to cause the lower section to drill in a predetermined direction.
17. A method for drilling a wellbore comprising: extending a rotatable drill string in the wellbore, the drill string having a bottom hole assembly coupled to a bottom end thereof; coupling a lower section of the bottom hole assembly comprising a steering apparatus to an upper section of the bottom hole assembly with a controllably adjustable clutch; detecting a steering apparatus toolface angle; controllably adjusting the clutch to maintain the steering apparatus toolface angle within a predetermined range about a target steering apparatus toolface angle while rotating the upper section with the drill string.
18. The method of claim 17 further comprising transmitting the detected steering apparatus toolface angle to a surface control unit.
19. The method of claim 18 further comprising downlinking an updated steering apparatus target toolface from the surface to a downhole controller.
20. The method of claim 17 further comprising storing a directional model in a downhole memory in data communication with a processor in a downhole controller.
21. The method of claim 18 further comprising calculating a new steering apparatus target toolface using the directional model stored in the downhole memory.
22. The method of claim 17 wherein detecting a steering apparatus toolface angle comprises disposing a directional sensor package in one of the upper section and the lower section of the bottom hole assembly.
23. The method of claim 17 further comprising transmitting a detected steering apparatus toolface to a controller in one of the upper section and the lower section.
Description:
BACKGROUND OF THE INVENTION
[0001] The present disclosure relates generally to the field of drilling systems, and more particularly to steerable drilling systems.
[0002] In directional drilling, for example horizontal drilling and geosteering applications it may be advantageous to use rotary steerable systems to prevent pipe sticking in the horizontal section. It may also be desirable to have the ability to have a drilling motor and bent sub for changing direction. In operation, the motor, and the bent sub may be non-rotating with respect to the borehole while changing direction. At the same time, it may be advantageous to have the drill string rotating to prevent differential sticking and to reduce friction with the borehole wall. A system providing these features may provide improved hole quality and drilling efficiency.
BRIEF DESCRIPTION OF THE DRAWINGS
[0003] A better understanding of the present invention can be obtained when the following detailed description of example embodiments are considered in conjunction with the following drawings, wherein:
[0004] FIG. 1 shows a schematic example of a drilling system according to one embodiment;
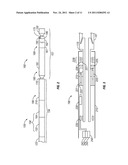
[0005] FIG. 2 is a schematic of an example bottom hole assembly containing an orienter having a clutch therein;
[0006] FIG. 3 is a diagram of an orienter having a clutch therein;
[0007] FIGS. 4A and 4B are views of an example steering apparatus in the bottom hole assembly;
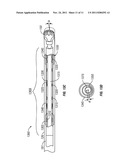
[0008] FIG. 5 is a schematic of another example of a bottom hole assembly containing a clutched orienter;
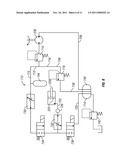
[0009] FIG. 6 is a logic diagram of one method of using a clutched orienter for use while rotating the drill string and steering;
[0010] FIG. 7 is a view showing an example of an acceptable range for a steering apparatus toolface about the target toolface;
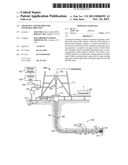
[0011] FIG. 8 is a view showing an example of a hydraulic schematic for controlling a clutch;
[0012] FIG. 9 is a schematic of an example bottom hole assembly containing an orienter having a clutch therein;
[0013] FIG. 10 is a diagram of an orienter having a clutch therein; and
[0014] FIG. 11 is a schematic of another example bottom hole assembly containing an orienter having a clutch therein.
[0015] FIG. 12A is a schematic of an example bottom hole assembly containing an orienter having a clutch therein and an adjustable steering apparatus;
[0016] FIG. 12B is a schematic of one example of a controllable member of an adjustable steering apparatus; and
[0017] FIGS. 13A-13D show an example of an adjustable steering apparatus having a controllably bendable drilling shaft.
[0018] While the invention is susceptible to various modifications and alternative forms, specific embodiments thereof are shown by way of example in the drawings and will herein be described in detail. It should be understood, however, that the drawings and detailed description thereto are not intended to limit the invention to the particular form disclosed, but on the contrary, the intention is to cover all modifications, equivalents and alternatives falling within the scope of the present invention as defined by the appended claims.
DETAILED DESCRIPTION
[0019] Described below are several illustrative embodiments of the present invention. They are meant as examples and not as limitations on the claims that follow.
[0020] As used herein, the term clutch is intended to mean a coupling mechanism for transmitting torque between two relatively rotatable members. The torque transmission mechanism may provide for locked rotation between the two relatively rotatable members. In addition, the torque transmission mechanism may be variable such that there is a controlled slip between the two relatively rotatable members. Clutch examples include, but are not limited to, a mechanical clutch, an electromagnetic clutch, and a hydraulic clutch.
[0021] FIG. 1 shows a schematic diagram of a drilling system 110 having a downhole assembly according to one embodiment of present invention. As shown, the system 110 includes a conventional derrick 111 erected on a derrick floor 112 which supports a rotary table 114 that is rotated by a prime mover (not shown) at a desired rotational speed. A drill string 120 comprising a drill pipe section 122 extends downward from rotary table 114 into a directional borehole, also called a wellbore, 126. Borehole 126 may travel in a two-dimensional and/or three-dimensional path. A drill bit 150 is attached to the downhole end of drill string 120 and disintegrates the geological formation 123 when drill bit 150 is rotated. The drill string 120 is coupled to a drawworks 130 via a kelly joint 121, swivel 128 and line 129 through a system of pulleys (not shown). During the drilling operations, drawworks 130 may be operated to raise and lower drill string 120 to control the weight on bit 150 and the rate of penetration of drill string 120 into borehole 126. The operation of drawworks 130 is well known in the art and is thus not described in detail herein.
[0022] During drilling operations a suitable drilling fluid (also called "mud") 131 from a mud pit 132 is circulated under pressure through drill string 120 by a mud pump 134. Drilling fluid 131 passes from mud pump 134 into drill string 120 via fluid line 138 and kelly joint 121. Drilling fluid 131 is discharged at the borehole bottom 151 through an opening in drill bit 150. Drilling fluid 131 circulates uphole through the annular space 127 between drill string 120 and borehole 126 and is discharged into mud pit 132 via a return line 135. A variety of sensors (not shown) may be appropriately deployed on the surface according to known methods in the art to provide information about various drilling-related parameters, such as fluid flow rate, weight on bit, hook load, etc.
[0023] In one example, a surface control unit 140 may receive signals from downhole sensors (discussed below) via a telemetry system and processes such signals according to programmed instructions provided to surface control unit 140. Surface control unit 140 may display desired drilling parameters and other information on a display/monitor 142 which may be used by an operator to control the drilling operations. Surface control unit 140 may contain a computer, memory for storing data, a data recorder, and other peripherals. Surface control unit 140 may also include drilling models and may process data according to programmed instructions, and respond to user commands entered through a suitable input device, such as a keyboard (not shown).
[0024] In one example embodiment of the present invention, a steerable drilling bottom hole assembly (BHA) 159 is attached to drill string 120, and may comprise a measurement while drilling (MWD) assembly 158, an orienter 190, a drilling motor 180, a steering apparatus 160, and drill bit 150. MWD assembly 158 may comprise a sensor section 164 and a telemetry transmitter 133. Sensor section 164 may comprise various sensors to provide information about the formation 123 and downhole drilling parameters.
[0025] MWD sensors in sensor section 164 may comprise a device to measure the formation resistivity, a gamma ray device for measuring the formation gamma ray intensity, directional sensors, for example inclinometers and magnetometers, to determine the inclination, azimuth, and high side of at least a portion of BHA 159, and pressure sensors for measuring drilling fluid pressure downhole. The above-noted devices may transmit data to a telemetry transmitter 133, which in turn transmits the data uphole to the surface control unit 140. In one embodiment a mud pulse telemetry technique may be used to generate encoded pressure pulses, also called pressure signals, that communicate data from downhole sensors and devices to the surface during drilling and/or logging operations. A transducer 143 may be placed in the mud supply line 138 to detect the encoded pressure signals responsive to the data transmitted by the downhole transmitter 133. Transducer 143 generates electrical signals in response to the mud pressure variations and transmits such signals to surface control unit 140. Alternatively, other telemetry techniques such as electromagnetic and/or acoustic techniques or any other suitable technique known in the art may be utilized for the purposes of this invention. In one embodiment, drill pipe sections 122 may comprise hard-wired drill pipe which may be used to communicate between the surface and downhole devices. Hard wired drill pipe may comprise segmented wired drill pipe sections with mating communication and/or power couplers in the tool joint area. Such hard-wired drill pipe sections are commercially available and will not be described here in more detail. In one example, combinations of the techniques described may be used. In one embodiment, a surface transmitter/receiver 180 communicates with downhole tools using any of the transmission techniques described, for example a mud pulse telemetry technique. This may enable two-way communication between surface control unit 140 and the downhole tools described below.
[0026] FIG. 2 shows an expanded view of one example of BHA 159. As shown therein, orienter 190 comprises a housing 210 that rotates with drill string 120. Orienter 190 also comprises a shaft 170 that may be controllably rotated relative to housing 210, as described below. The relative motion of orienter shaft 170 relative to orienter housing 210 allows BHA 159 to be considered to have an upper BHA section 156 that may rotate with drill string 120, and a lower BHA section 157 that rotates at the same speed as the drill string, at a different speed as the drill string 120, or that is substantially non-rotating. In one example, if drill string 120 is rotating slowly, orienter shaft 170 may rotate in an opposite direction relative to drill string 120.
[0027] A drilling motor 180 may be attached to orienter shaft 170. In one example, drilling motor 180 may be a fluid powered positive displacement motor using the Moineau principle known in the art. As fluid passes through drilling motor 180 it forces the motor shaft 175 to rotate relative to motor housing 181. In one embodiment, the rotating motor shaft 175 passes through steering apparatus 160 and is coupled to, and rotates bit 150. In the embodiment shown in FIG. 2, steering apparatus 160 comprises a bent sub 169. The rotation of motor shaft 175 causes a reaction torque on housing 181 and causes housing 181 to rotate in the reverse direction relative to the motor shaft 175 rotation. This reverse rotation may also cause orienter shaft 170 to rotate relative to orienter housing 210 when orienter shaft 170 is not locked rotationally with orienter housing 210 by a clutch.
[0028] Also referring to FIG. 3, in one embodiment, the relative reactive rotation of orienter shaft 170 relative to orienter housing 210 may be used to generate hydraulic power. In the example shown in FIG. 3, an angled swash plate 215 is coupled to shaft 170. As shaft 170 rotates, it force pistons 220 to reciprocate in bores 221 in pump housing 222 that may be coupled to orienter housing 210. Solenoid valve 230 may be actuated by controller 240 such that hydraulic fluid is pressurized to force piston 225 to move axially to force the clutch plates 226 and 227 of clutch 228 into controllable contact. Alternatively, any suitable positive displacement type hydraulic pump may be used. As shown, housing clutch plates 226 are engaged with orienter housing 210, for example by an axially extending spline arrangement (not shown) known in the art. Mating shaft clutch plates 227 may be engaged with orienter shaft 170 using a similar spline arrangement. The splines allow axial movement of the clutch plates and also transmit torque when the housing clutch plates 226 are frictionally engaged with the shaft clutch plates 227. The amount of torque transmitted may be adjusted by varying the axial force, and hence the friction, between the plates. In one example, the frictional force may be adjusted such that there is controlled slippage between clutch plates 226 and 227.
[0029] FIG. 8 depicts one example of a hydraulic circuit 712 for operating clutch 228 in the orienter 190. In this example, the frictional force on clutch 228 is adjusted by adjusting the fluid pressure acting on piston 225. The fluid pressure is adjusted by controlling the flow resistance downstream of piston 225. As shown in FIG. 8, hydraulic loop 712 comprises a first flow restrictor 730 positioned in loop 712 on an upstream side of clutch 228 and a second flow restrictor 732 positioned on a downstream side of clutch 228.
[0030] Referring to FIG. 8, hydraulic circuit 712 may also comprise a first valve 734 positioned on the upstream side of piston 225 and a second valve 736 positioned in loop 712 on the downstream side of piston 225. The valves (734, 736) may each be actuated between an open position and a closed position in which the loop 712 is blocked between the first valve 734 and the second valve 736 in order to maintain the engagement force between the clutch plates 226 and 227 of clutch 228. The valves (734, 736) may be actuatable by orienter controller 240.
[0031] Referring to FIG. 8, the loop 712 may comprise a pressure relief bypass line 738 for bypassing the first valve 734 and the second valve 736 when the fluid pressure in loop 712 exceeds a preset bypass pressure. Pressure relief bypass line 738 leads to the low pressure reservoir 740 which provides the pumping fluid 714 to the pump 230. Dump valve 742 releases an amount of the pumping fluid 714 from the loop 712 when the fluid pressure in the loop 712 exceeds a preset dump pressure. Accumulator 744 is in fluid communication with loop 712, and supplies additional pumping fluid to the loop when the fluid pressure in the loop 712 is below a preset accumulator threshold pressure.
[0032] The pumping fluid 714 is drawn from reservoir 740 and pumped by the pump 230 via a reservoir supply line 708 as the orienter shaft 170 rotates relative to the orienter housing 210 (see FIG. 3). Pumping fluid 714 passes through check valve 710 to a manifold 713. Two lines extend from manifold 713. A first manifold line 715 extends between the manifold 713 and first valve 734. First flow restrictor 730 is positioned within first manifold line 715 in order to control the flow rate of the pumped. A second manifold line 716 extends between the manifold 713 and a pressure relief bypass valve 718 through line 738 to low pressure reservoir 740.
[0033] In operation, if the first valve 734 is closed, the fluid pressure in the manifold 713 will increase as pump 230 pumps the pumping fluid 714 until the fluid pressure exceeds the bypass pressure, at which point the pumping fluid 714 will pass through the pressure relief bypass valve 718 to the reservoir 740. If the first valve 734 is open, the pumping fluid 714 passes from the second manifold line 715 to a clutch actuation line 720 which extends between the first valve 734 and the second valve 736. A clutch pressure line 722 extends between the clutch actuation line 720 and a piston 225 so that the fluid pressure in the clutch pressure line 722 is equal to the fluid pressure in the clutch actuation line 720.
[0034] Orienter 190 may be actuated to allow rotation of shaft 170 relative to orienter housing 210 by providing a fluid pressure in the clutch pressure line 722 which is less than a locking pressure which is required to provide a locked engagement force between clutch plates (226, 227). Such a fluid pressure may be achieved by selectively actuating valves (734, 736). As one example, first valve 734 may be actuated to the closed position while second valve 736 is actuated to the open position. As a second example, both valves (734, 736) may be actuated to the closed position while the fluid pressure in the clutch pressure line 722 is less than the locking pressure. As a third example, both valves (734, 736) may be actuated to the open position if the pumping resistance in the loop 712 provides a fluid pressure in the clutch pressure line 722 which is less than the locking pressure. In one example, the pumping resistance in loop 712 may be adjusted by pulsing valve 736 to maintain pressure in the clutch pressure line 722. Pressure sensor 726 may be monitored to provide a feedback input to controller 240 (see FIG. 3) to allow a substantially constant pressure to be maintained in clutch pressure line. The magnitude of the pressure may be adjusted by varying the frequency and duration of the pulses of valve 736.
[0035] Orienter 190 may be actuated to prevent rotation of orienter shaft 170 relative to orienter housing 210 by providing a fluid pressure in the clutch pressure line 722 which is greater than or equal to a locking pressure which is required to provide a locking engagement force between the clutch plates (226, 227) (see FIG. 3). As one example, first valve 734 may be actuated to the open position while second valve 736 is actuated to the closed position, thereby causing the fluid pressure in the clutch pressure line 722 to increase to the locking pressure (which locking pressure is less than or equal to the bypass pressure as determined by the pressure relief bypass line 738. First valve 734 may then be closed in order to "trap" the locking pressure in the clutch pressure line 722. Unlocking of orienter 190 may be achieved by actuating second valve 736 to the open position in order to permit the pumping fluid 714 to move from the clutch pressure line 722 back to the reservoir 740.
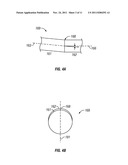
[0036] In one embodiment, also referring to FIGS. 4A and 4B, bent sub 169 comprises an upper section 161 and a lower section 162. In one example, the upper section 161 and the lower section 162 are adjustable such that the longitudinal axis 163 of upper section 161 may be adjustably angularly offset with respect to the longitudinal axis 166 of lower section 162 by an angle a. Alternatively, the upper section 161 and the lower section 162 may formed with a fixed angular offset. The tool face 168 of bent sub 169 is defined herein, see FIG. 4A, to indicate where the upper surfaces of upper section 161 and lower section 162 intersect with the plane 191 that contains upper section axis 163 and lower section axis 166, at the inward bend point on the outer surfaces. The bit 150 will have a tendency to drill in the direction of the bent sub tool face, for example, upwardly in the direction normal to the vertex and in plane 191, as shown in the 2-dimensional illustrations of FIGS. 4A and 4B. It will be appreciated by one skilled in the art, that, in operation, the bent sub toolface 168 may be positioned at any rotational angle in the borehole to allow 3-dimensional steering of BHA 159.
[0037] In one embodiment, the toolface 168 of bent sub 169 and attached drilling motor housing 181 may be referenced relative to the high side of the wellbore by using a directional sensor package 195 that may be located in sensor sub 196. Measurements from the directional sensors may be used to determine the toolface 168 of bent sub 169 with respect to gravity and/or magnetic north using techniques known in the art. If a gyroscope is used, a gyro north may be referenced. The wellbore high side is commonly referenced to the gravity high side for wellbore inclinations greater than about 5°. For inclinations of about 5°, or less, magnetic north may referred to as the wellbore high side. Communications of measured data between sensor sub 196 and orienter 190 may be achieved via use of an acoustic or electromagnetic telemetry short hop technique, or by a slip ring 235 (see FIG. 3), or an inductive coupler. These short hop telemetry techniques are well known in the art, as are slip rings and inductive couplers. Via such linkages, data from the directional sensor package 195 can be conveyed to the orienter 190 in real time for real time control of the orienter clutch. Using these measurements, the bent sub toolface may be maintained within a predetermined range by adjusting the clutch slippage such that the drill string above orienter 190 may continuously rotate while the drilling motor and bent sub toolface remain oriented substantially at the desired toolface to drill in the desired direction. Alternatively, directional sensor package 195 and sensor sub 196 may be located at any suitable position in the lower portion of BHA 159 that rotates with orienter shaft 170. In one example, bent sub toolface readings may be communicated to telemetry transmitter 133 and then transmitted to surface control unit 140 for processing and display. Surface control unit 140 may transmit changes in bent sub toolface to controller 240 using suitable downlink techniques known in the art.
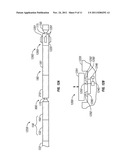
[0038] In another embodiment, also referring to FIG. 5, a BHA 259 comprises a different arrangement of downhole tools. In BHA 259, orienter 190 is attached to drill string 120. Attached to orienter shaft is MWD 158, motor 180 and bent sub 169. As before, bit 150 is attached to motor shaft 175. In this arrangement, MWD 158 rotates with the motor and bent sub. As such, the MWD directional sensor package 295 may be used determine the toolface of bent sub 169 in the wellbore. In one example, this data may be communicated to orienter 190 using any of the short hop techniques described above. In another example, the data may be transmitted by hard wire along, or in, shaft 170 and transferred by slip ring 235 to orienter controller 240 (see FIG. 3). Alternatively, an inductive coupler may be used to transfer information to orienter controller 240. As described above, the relative motion of orienter shaft 170 relative to orienter housing 210 allows BHA 159 to be considered to have an upper BHA section 156 that rotates with drill string 120, and a lower BHA section 157 that rotates at the same speed as the drill string, at a different speed as the drill string 120, or that is substantially non-rotating. In one example, if drill string 120 is rotating slowly, orienter shaft 170 may rotate in an opposite direction relative to drill string 120.
[0039] In one embodiment, orienter controller 240 comprises a processor 241 in data communication with a memory 242, and interface circuits 243. Processor 241 may be any processor suitable for downhole use. Memory 242 may comprise RAM, ROM, EPROM EEPROM, flash memory, or any other suitable memory. In one example, orienter controller 240 may be programmed at the surface with appropriate bent sub target toolface angles for drilling a section of the wellbore. In addition, commands from surface control unit 140 may be transmitted downhole to adjust the target toolface orientation. In yet another example, a target directional well path may be stored in controller 240. Downhole directional measurements may be used to determine an actual well path, and/or deviations from the target path. Programmed instructions stored in controller 240 may be used to adjust the toolface of bent sub 169 to adjust the wellbore trajectory back along the target path. Alternatively, directional measurements may be transmitted to the surface to determine any needed trajectory corrections. New target toolface values may then be downlinked to controller 240 for execution.
[0040] In operation, in one example, the hydraulic pressure on piston 225 (see FIG. 3) is increased such that the frictional force on clutch plates 226, 227 is increased to the point that orienter housing 210 and orienter shaft 170 are locked and there is substantially no differential rotation between orienter housing 210 and orienter shaft 170. Then bent sub 169 rotates at the substantially the same rate as drill string 120. This condition allows straight ahead drilling of wellbore 126. When it is desired to deviate the wellbore from a straight direction, a bent sub toolface may be calculated and positioned to cause the path to turn in the desired direction by setting a new target toolface in orienter controller 240. In one example, the pressure on piston 225 is reduced to the point that orienter shaft 170 rotates relative to orienter housing 210. Due to the reactive torque, bent sub 169 rotates opposite the direction of bit rotation. The bent sub toolface is monitored by directional sensors 195 and/or 295. When the bent sub toolface is within an acceptable range of the new target toolface, the pressure on piston 225 is controllably increased to maintain the bent sub toolface within the allowable range. In one example, see FIG. 7, the allowable toolface range is about ±45° around the target toolface 710. As the drill string RPM is changed, changes in bent sub toolface are sensed by the appropriate sensors and fed back to orienter controller 240. Orienter controller 240 adjusts the pressure on piston 225 thereby adjusting the frictional force on clutch plates 226 and 227 to provide a controllable slip between clutch plates 226 and 227 to maintain the bent sub toolface within the acceptable range about the target toolface.
[0041] This operational method is shown in FIG. 6, where the clutch may be locked in logic box 610 such that the orienter shaft 170 and orienter housing 210 both rotate at the same RPM as drill string 120 in logic box 620. When a new direction is desired, a new target bent sub 169 toolface may be calculated and transmitted to orienter controller 240. Orienter controller 240 receives the new target toolface in logic box 630. The clutch is unlocked in logic box 640 and the bent sub is allowed to rotate relative to the orienter housing 210. The bent sub rotation is monitored in logic box 650. When the bent sub toolface is within the acceptable range, the clutch friction is increased in logic box 660. The drill string continues to rotate and the clutch friction is adjusted to maintain the bent sub toolface within the acceptable target toolface range in logic box 670. This process may be repeated each time a new bent sub toolface is desired.
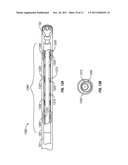
[0042] In yet another embodiment, see FIGS. 9 and 10, a bottom hole assembly 959 comprises an orienter 990. Orienter 990 is similar to orienter 190 as described with respect to FIGS. 2 and 3. Orienter 990 further comprises a directional sensor package 937 located in housing 210 of orienter 990. Housing 210 is a component of upper portion 956 of BHA 959 and rotates with drill string 120. Since the sensor package 937 rotates with the upper portion 956, a referencing sensor 940 provides relative rotational orientation between the upper section 956 and the lower section 957. Referencing sensor 940 may comprise an inner ring 936 attached to an end of shaft 170, and an outer ring 935 attached to housing 210. The relative position of rings 935 and 936 may be determined using magnetic, inductive, and/or optical techniques known in the art. Then, the actual orientation of housing 210, provided by directional sensor package 937, along with the relative position of shaft 170 with respect to housing 210, provided by referencing sensor 940, allows the actual orientation of lower assembly 957 to be determined.
[0043] In another embodiment, see FIG. 11, BHA 1059 comprises an orienter 990 that is reversed in direction from that of FIG. 9. This orientation allows the directional sensor package 937 (see FIG. 10) to be referenced to the bent sub high side using a simple mechanical offset measurement at assembly. The directional sensor package may make direct measurements of the high side orientation without requiring a separate referencing sensor.
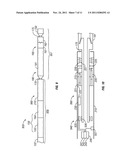
[0044] In yet another embodiment, shown in FIGS. 12A and 12B, a steering apparatus 1260 is disposed in BHA 1259. Steering apparatus 1260 may comprise a steerable assembly 1269 comprising at least one controllably extendable member 1291 disposed around the perimeter of steering sub body 1220. Controllably extendable member 1291 may be extended to contact a wall of borehole 126 to cause bit 150 to drill in a predetermined direction. Actuators 1290 may extend and retract member 1291 to any position between fully extended and fully retracted. In one example, a sensor 1250 may detect the position of extendable member 1291 and transmit a signal representative thereof to steerable assembly controller 1240. Steerable assembly controller 1240 may be in data communication with a directional sensor package (not shown) in BHA 1259 for determining a high side of steering apparatus 1260, as previously described. Steerable assembly controller 1240 may also be in data communication with a controller in orienter 990. The controller in orienter 990 may provide instructions for adjusting extendable members 1291 to steerable assembly controller 1240 to change or maintain the path of drill bit 150 along a predetermined path. In one example, actuators 1290 may be hydraulic actuators extending shafts 1292 to position extendable members 1291 at appropriate positions. Hydraulic source 1246 may supply hydraulic fluid to actuators 1292 under direction of steerable assembly controller 1240. Orienter 990 may be operated to maintain the high side of steerable assembly 1269 within a predetermined range of a target high side while controlling the position of extendable members 1291.
[0045] Alternatively, in still another embodiment, see FIGS. 13A-13D, a steering apparatus 1360 comprises a steerable assembly 1369 that may be attached to any of the BHA's previously discussed. Steerable assembly 1369 comprises a rotatable drilling shaft 1375, coupled to bit 150. A housing 1346 rotatably supports at least a length of drilling shaft 1375. A deflection assembly 1320 is contained within housing 1346 for bending the drilling shaft 1375 between a first bearing 1315 and a second bearing 1335. Deflection assembly 1320 comprises an outer ring 1345 which is rotatably supported on a circular inner peripheral surface of housing 1346. Outer ring 1345 has a circular inner peripheral surface that is eccentric with respect to housing 1346. Deflection assembly 1320 also comprises an inner ring 1350 which is rotatably supported on the circular inner peripheral surface of outer ring 1345 and which has a circular inner peripheral surface that engages drilling shaft 1375, and which is eccentric with respect to the circular inner peripheral surface of outer ring 1345. By rotating the outer ring 1345 and the inner 1350 relative to each other, and to housing 1346, shaft 1375 may be deflected by a distance, e, such that bit 150 drills in a direction, 8, from the previous borehole centerline. Outer ring 1345 and inner ring 1350 may be controllably rotated relative to each other and to housing 1346 by an actuator 1325. In one example, actuator 1325 may comprise a motor driven gear drive for rotating the outer ring 1345 and the inner ring 1350 relative to each other. Alternatively, actuator 1325 may comprise a clutch that engages a harmonic drive gear system coupling power from drilling shaft 1375 to rotate outer ring 1345 and inner ring 1350 relative to each other and to housing 1346, thereby deflecting drilling shaft 1375 a predetermined amount. Controller 1326 may comprise a processor in data communications with the controller in any of the orienters described above. In one embodiment, the toolface of housing 1346 may controlled using the orienters described above, and the deflection of drilling shaft 1375 may be controlled with respect to the toolface angle by the proper rotation of outer ring 1345 and inner ring 1350 relative to the toolface of housing 1346.
[0046] Numerous variations and modifications will become apparent to those skilled in the art. It is intended that the following claims be interpreted to embrace all such variations and modifications.
User Contributions:
Comment about this patent or add new information about this topic:
Images included with this patent application:
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
| Similar patent applications: | |
| Date | Title |
|---|---|
| 2008-11-13 | Method and system to recover usable oil-based drilling muds from used and unacceptable oil-based drilling muds |
| 2009-01-08 | Rotary steerable motor system for underground drilling |
| 2009-02-26 | Steerable drill bit arrangement |
| 2009-03-26 | Steerable drill bit arrangement |
| 2009-04-16 | System, method, and apparatus for variable junk slot depth in drill bit body to alleviate balling |
| New patent applications in this class: | |
| Date | Title |
|---|---|
| 2019-05-16 | A drilling system including a driveshaft/housing lock |
| 2017-08-17 | Drilling machine |
| 2016-04-07 | Drill bit with extendable gauge pads |
| 2016-03-24 | Bi-directional cv-joint for a rotary steerable system |
| 2016-03-24 | Insert and method for directional drilling |
| New patent applications from these inventors: | |
| Date | Title |
|---|---|
| 2021-07-01 | System and method to control a dual motor rotary steerable tool |
| 2015-01-08 | Subsurface well systems with multiple drain wells extending from production well and methods for use thereof |
| 2014-11-20 | Systems and tools for detecting restricted or hazardous substances |
| 2014-08-21 | Systems and methods for automatic weight on bit sensor calibration and regulating buckling of a drillstring |
| 2014-07-10 | System and method for automatic weight-on-bit sensor calibration |
| Top Inventors for class "Boring or penetrating the earth" | |
| Rank | Inventor's name |
|---|---|
| 1 | David R. Hall |
| 2 | Anthony A. Digiovanni |
| 3 | Danny E. Scott |
| 4 | Youhe Zhang |
| 5 | Steven R. Radford |