Patent application title: AUTONOMOUS, MULTIPURPOSE FLOATING PLATFORM FOR ENVIRONMENTAL AND OCEANOGRAPHIC MONITORING
Inventors:
Marcelo Carro Donna (Concepcion, CL)
Alejandro Alejo Vergel (Concepcion, CL)
Luis Aguayo Matamala (Concepcion, CL)
Hector Moyano Solis (Concepcion, CL)
Cristian Neira Silva (Talcahuano, CL)
Rodrigo Garay Jimenez (Concepcion, CL)
Doris Catrinahuel Montenegro (Talcahuano, CL)
IPC8 Class: AB63B3544FI
USPC Class:
114264
Class name: Ships floating platform
Publication date: 2008-09-18
Patent application number: 20080223278
Inventors list |
Agents list |
Assignees list |
List by place |
Classification tree browser |
Top 100 Inventors |
Top 100 Agents |
Top 100 Assignees |
Usenet FAQ Index |
Documents |
Other FAQs |
Patent application title: AUTONOMOUS, MULTIPURPOSE FLOATING PLATFORM FOR ENVIRONMENTAL AND OCEANOGRAPHIC MONITORING
Inventors:
Marcelo CARRO DONNA
Alejandro Alejo Vergel
Luis Aguayo Matamala
Hector Moyano Solis
Cristian Neira Silva
Rodrigo Garay Jimenez
Doris Catrinahuel Montenegro
Agents:
ET SEQ LIMITADA
Assignees:
Origin: TOLUCA LAKE, CA US
IPC8 Class: AB63B3544FI
USPC Class:
114264
Abstract:
Highly stable floating platform for measuring surface and subsurface
environmental variables. It consists of a main toroidal body, inside of
which equipments are installed, mainly on its base, to maintain low and
nearby the centers of gravity and of buoyancy, allowing the in situ
inspection, maintenance and installation of equipments. One winch in its
interior allows the translation of equipment and/or to take water
samples, from surface to a user-defined depth, using a cable deployed
through the center of the platform, for providing power and communication
with the surface to said equipment.Claims:
1. An autonomous, multipurpose floating platform adequate for in situ
environmental monitoring, over- and under the water surface in shallow
zones, comprising a main toroidal body of inner cylindrical cross-section
that allows the communication by its inner part, between the free surface
and the upper part, with a hollow body with the shape of a truncated
cone, with electrical- and electronic equipment, split in its interior in
tight compartments which allow the installation of an electrical winch
for vertically translating the measuring devices through a coiling
element, within a range going from the surface of the water to a depth
defined by the length of the installed cable, deployed through the center
of the floating platform, which is capable both of supporting at its end
the weight of the measuring instruments, and also for supplying them
power and communications with surface, the platform having its buoyancy
center (1b) and its gravity center (1a) nearby together, and they are
similarly maintained.
2. An autonomous, multipurpose floating platform for environmental monitoring according to claim 1, wherein the hollow truncated cone structure provides support to different components, such as the spring-pulley mechanism of the winch, and profilers, tools, sensors and electrical control systems.
3. An autonomous, multipurpose floating platform for environmental monitoring according to claim 1, wherein the toroidal main body and hollow truncated cone structure has a tripod structure with a platform adequate for: installing solar panels, atmospheric measuring equipment, beacons, communication equipment for providing a bi-directional wireless linkage, and a source of energy.
4. An autonomous, multipurpose floating platform for environmental monitoring according to claim 1, wherein the vertical translation speed of the coiling element can be defined according to the measuring needs.
5. An autonomous, multipurpose floating platform for environmental monitoring according to claim 4, wherein the vertical translation from the coiling element can be stopped at pre-determined intervals and depths.
6. An autonomous, multipurpose floating platform for environmental monitoring according to claim 5, wherein the coiling element is a mechanical cable.
7. An autonomous, multipurpose floating platform for environmental monitoring according to claim 5, wherein the coiling element is a hose.
8. An autonomous, multipurpose floating platform for environmental monitoring according to claim 5, wherein the coiling element is a rope.
9. An autonomous, multipurpose floating platform for environmental monitoring according to claim 5, wherein the coiling element is an electrical cable.
10. An autonomous, multipurpose floating platform for environmental monitoring according to claim 5, wherein the coiling element is an electromechanical cable.
11. An autonomous, multipurpose floating platform for environmental monitoring according claim 1, wherein the main toroidal body has a chamfer in its bottom part, which improves the stability against the wave action and wild conditions.
12. An autonomous, multipurpose floating platform for environmental monitoring according to claim 1, wherein the main toroidal body has an inner chamfer, at its bottom part, for decrease the collision of the coiling element or cable from the winch, against the bottom edges, in strong wave action conditions.
13. An autonomous, multipurpose floating platform for environmental monitoring according to claim 1, wherein one preferred inner volume of the main toroidal body is 3 cubic meters.
14. An autonomous, multipurpose floating platform for environmental monitoring according to claim 13, wherein said volume allows the generation of the buoyancy and equilibrium necessary for maintaining the platform on an adequate water line, and stable for all the structure and its components, because the buoyancy center (1b) and the gravity center (1a) are nearby together, one above the other and they are similarly maintained.
15. An autonomous, multipurpose floating platform for environmental monitoring according claim 13, wherein said volume allows the addition of a weight of 1500 kg in systems and additional components, adequately distributed both in its exterior as well as in its interior.
16. An autonomous, multipurpose floating platform for environmental monitoring according to claim 11, wherein said external chamfers have at least one eyebolt with chains for mooring the floating platform, spaced 90.degree. from each other relative to the main axis of the platform.
17. An autonomous, multipurpose floating platform for environmental monitoring according to claim 16, wherein the mooring minimizes the rotation around the main axis of the platform, thus avoiding the tangling of the coiling element handled by the winch, with the mooring chains.
18. An autonomous, multipurpose floating platform for environmental monitoring according to claim 17, wherein the mooring allows the orientation of the solar panels to the direction of maximum solar radiation.
19. An autonomous, multipurpose floating platform for environmental monitoring according to claim 3, wherein the generation of electric power for the floating platform is based on an arrangement of photovoltaic panels installed on the tower of the platform, which are interconnected in such a way to achieve a nominal voltage according to the specifications for the system's electrical components. The electric power generated by these panels is sent to the inside of the tight sections, through cables disposed into a channeling that descends on one of the sections forming the tower, and enters to the floating platform main body to reach a power switchgear.
20. An autonomous, multipurpose floating platform for environmental monitoring according to claim 19, wherein this power is managed by at least one electronic battery charger, storing the power in a bank of batteries of 24V nominal voltage.
21. An autonomous, multipurpose floating platform for environmental monitoring according to claim 20, wherein the batteries used are 12 V sealed, and the bank consists of at least 4 of them.
22. An autonomous, multipurpose floating platform for environmental monitoring according to claim 21, wherein each of these batteries is located into one hermetic plastic box having a handle, to ease its transportation and installation, that also protects them against the environmental humidity; the boxes being installed in one of the hermetic compartments of the main body of the floating platform, specifically, in the same compartment where the electrical boards are located.
23. An autonomous, multipurpose floating platform for environmental monitoring according to claim 22, wherein each of these plastic boxes has a female contact for panel, and there are at least four male flying plugs to connect the batteries with the switchgear by a 2-way cable, where the configuration of the bank of batteries is done inside the switchgear using contact boxes, with a charge regulator, and with the protections and electrical loads of the system.
24. An autonomous, multipurpose floating platform for environmental monitoring according to claim 23, wherein the floating platform has at least two plastic boards with protection of the degree IP68, both installed inside a hermetic compartment, where one of them is for the installation of power components, one charge regulator for batteries, and electrical protections of the systems, while the second one is devoted to the installation of one high-performance CPU, to command the system and other electronic boards necessary to the operation of the on-board equipment.
25. An autonomous, multipurpose floating platform for environmental monitoring according to claim 24, wherein this CPU is connected to the other components aboard the platform using two methods: through serial ports/ethernet, and through a Multi I/O card, having the capability to manage a wide variety of analogue- and digital inputs/outputs, in order to provide capabilities for both receiving information, and also for being able to actuate different components, of analogue and also digital nature (relays, motors, actuators, etc.).
26. An autonomous, multipurpose floating platform for environmental monitoring according to claim 1, wherein the operation of the electric winch can be done in automatic mode through sending commands and also manually, by means of an external pushbutton station.
27. An autonomous, multipurpose floating platform for environmental monitoring according to claim 26, wherein both operating modes are supervised by a microcontroller having the adequate programming for actuating the winch motor, based on commands received from the CPU, or based on digital inputs originated in the pushbutton station.
28. An autonomous, multipurpose floating platform for environmental monitoring according to claim 27, wherein said microcontroller activates the control signals for a winch motor driver that allows setting of different operating parameters for the electrical motor, such as acceleration time, deceleration time, maximum speed to reach and sense of rotation, among others.
29. An autonomous, multipurpose floating platform for environmental monitoring according to claim 28, wherein said motor is of the permanent magnet type, and is coupled through a speed reducer to actuate the winch drum, and three sealed magnetic sensors are used into the winch for feeding back the conditions of its operation: one for setting the lower limit of the cable, one for the upper limit of the cable and the third for counting the revolutions of the drum.
30. An autonomous, multipurpose floating platform for environmental monitoring according to claim 1, wherein said measuring equipment that is used consists of a submersible multi parameter equipment, capable of obtaining simultaneous readings of different variables, and directly supplying them through a serial port of the type RS232C.
31. An autonomous, multipurpose floating platform for environmental monitoring according claim 30, wherein said measuring equipment does not have an internal battery, because the power is supplied through the cable that supports it, and that allows also to establish communications with the surface.
32. An autonomous, multipurpose floating platform for environmental monitoring according to claim 30, wherein the use of other sensors or measuring and/or water quality analysis instruments will be restricted only to those having a communications method based on a standard protocol that allows the physical connection to the CPU, and the knowledge of the commands for the configuration and consultation of the equipment.
33. An autonomous, multipurpose floating platform for environmental monitoring according to claim 3, wherein the communications equipment used is an RF transceiver that can provide a transmission power of up to 1 watt, programmed for receiving commands and dispatch messages coming from the system CPU, done through a serial inter phase RS232C, capable of bi-directional communications, point-to-point, or point-to-multipoint, located in the upper part of the floating platform's tower.
34. An autonomous, multipurpose floating platform for environmental monitoring according to claim 3, wherein the communications equipment uses a GSM modem in its send- and receive SMS mode, or for establishing a point-to-point connection through a telephone access to networks based in conventional telephony.
35. An autonomous, multipurpose floating platform for environmental monitoring according to claim 3, wherein the communication equipment uses a satellite telephony modem, so that the operating zone is limited only by the availability of satellite service for the location of the platform.
36. An autonomous, multipurpose floating platform for environmental monitoring according to claim 3, wherein the communications equipment uses GPS or a weather station, having standard- or adaptable to standard communications serial ports, for being directly connected to the main module, where the adequate routines are programmed for consulting the equipments.
37. An autonomous, multipurpose floating platform for environmental monitoring according to all the above claims, wherein the data obtained from these equipments can be relayed to land through the implemented telemetric wireless link, for their analysis and/or being processed on board of the platform to be taken into account in the control- or programming operation for the system.
38. An autonomous, multipurpose floating platform for environmental monitoring according all the above claims, wherein additional data can be obtained through a telemetric link, both from other similar monitoring systems, or also directly inputted by the user, to be included in the decision making about control or programming of the operation of the system.
39. An autonomous, multipurpose floating platform for environmental monitoring according to all the above claims, wherein the platform can be wirelessly integrated to other complex systems which allow the actuation of components and/or sharing information with external subjects.
40. An autonomous, multipurpose floating platform for environmental monitoring according to all the above claims, wherein the operation, configuration and/or modification of the parameters can be done remotely, through the implemented telemetric wireless link, using the equipment and control software.
Description:
FIELD OF APPLICATION
[0001]One floating platform with profiling system adequate for installing a wide range of sensors and measuring equipment in places very near (0.5 m) to surface, for capturing information and relaying it to a receiving system. Special emphasis is devoted to following items in its design: stability for the platform, sensors, and equipment; in situ maintenance, inspection and installation of equipment, and environmental protection for the various systems.
DESCRIPTION OF PREVIOUS ART
[0002]Presently, environmental measurements and monitoring are increasingly necessary for different geographical zones and places, mainly owing to the increasing implement of national- and international environmental standards to be observed by countries and companies in order to comply with production standards. This information is also necessary to the knowledge of scientific community and for the studies in this field.
[0003]One such field where companies and scientists have focused their attention is the development of equipment and instruments for different existing aquatic media such as oceans, rivers, lakes, and others, according to the specific conditions imposed by them.
[0004]The need of having dependable and easily maintained and installed equipment, capable of resisting the environmental conditions characteristic of aquatic environments, and having low operating costs during their useful life, has determined a set of parameters to be developed and incorporated by companies and scientists for incorporating them in their equipments and products.
[0005]Some of these systems are those developed by the firm YSI, in United States of America, and incorporated into their following Environmental Monitoring Modules (EMM): 550, 700, 800, 2000, 6950, 6951 and 6952. These profiling systems for water bodies have different installation forms, and have built-in sensors developed by themselves.
[0006]Among the systems design which are most similar to the invention, there are a sealed cylindrical can of plastic material, having a central bore that allows the passage of a cable and the profiling system, for using with a winch installed on the platform, thus allowing the compiling the profiles and supporting the different electrical and electronic modules for controlling the devices, doing the measurements and relaying the information. In some models, under the platform, a rectangular structure is connected which serves for connecting the platform's mooring elements.
[0007]Some of the differences encountered in this system are the height of their gravity center considering the placing of the equipments and the materials of construction of them, which can make the system susceptible to tipping and instability. Its stability against the surface waves is different, considering the flat and straight profiles of some models. Also, their bottom structure makes it difficult the profiling near surface in places with strong wave action, because the profiler can collide with the bottom structure. Its dimensions and design do not allow the possibility of doing maintenance and inspections on the platform. Some models provide little or no environmental protection to some components, such as the winch.
[0008]A system similar to the above one, in form and operation, as well as in differentiating design aspects, is the one developed by the University of Washington in the United States of America, for ORCAS project, which is devoted to research studies.
[0009]Another model, although somewhat distanced to the invention relative to the former two, is that developed by the Italian firm Idronaut, model Profiling Buoy 601 and 701. This buoy has a profiling system handled by a winch, installed on the top part of the buoy, having a side arm with a pulley where the profiler and the cable is passed through, by one side of the buoy; the profiler is also developed by this companies, and the system has capabilities of storage and relaying of information.
[0010]In this system differences are observed regarding the lateral location of the profiler, which is exposed to the environment and it has a great possibility of being stolen, and also it causes instability because the profiler is distanced from the gravity- and buoyancy center of the whole system. Because of its dimensions, it is difficult the boarding of the buoy for doing in-place maintenance and inspections, and one has to hoist the buoy to a ship, or landing it.
[0011]Another buoy model, equipped with a winch, that is similar to the invention, but having a different design, is the one described in U.S. Pat. No. 3,727,248: it is an adjustable buoy, specially built to reduce the effect of ocean waves and forces on the buoy. From the buoy, sensors for determining the horizontal- and vertical velocity in the ocean are suspended. The part that normally would be exposed to the waves has a relatively small diameter, relative to its largest cross-section. The stabilizing part of the buoy comprises several bodies installed along a longitudinal horizontal axis, radially spaced relative to vertical buoy axis, located under the surface, and in calm waters. The required diameter for the bodies is variable, depending on the local conditions of the ocean, and must be kept below certain value according to the expression (Um×T)/D<10, being UM the speed amplitude, relative between the water and the body, T is the vibration period, and D is the diameter of the body.
[0012]The system consists of a floating body, joined by means of supports to a circular ring of rectangular cross-section, which is dimensioned according to the usual conditions of the ocean. At the center of the ring, joined with it by tensors, there is a container for ballast that provides stability to the system. The measuring system hangs from a mast over the buoy which, aided by a measuring cable and a winch installed over the buoy, can be hoisted and lowered through the main axis of the buoy. The sensors cannot operate near the bottom structure, because they could be hit. The buoy is positioned by means of three anchor cables, installed at 120° from each other; these must have a homogeneous buoyant force, in order to not influence the buoy movements. The buoy's center of gravity must be maintained as deep as possible, under the displacement center and near it. The required position of the center of gravity is obtained by means of an adequate ballast from the stabilizer body and of the ballast tank. According to the abovementioned, this design of mast-buoy is different from the design of the disc-type buoy according to the proposed invention.
[0013]A further model of profiling buoy, having another mechanical system is the one described in WO 98/21087 sensing station, having a three-arm buoy hooked to the ocean floor by means of a guiding cable, this cable being traversed by a sensor module which is submerged and communicated with the buoy by means of an electrical cable. The depth of the sensor module can be adjusted by means of a depth-control pump located on the module, which injects or extracts water from or into a sealed chamber, according to the depth targeted to sense the water parameters. The buoy provides space for installation of solar panels, batteries, data-handling systems, communication and control of equipments. This system processes the collected data and relays the signals, in real-time, to a remote station, or else the data can be stored in a buffer for their subsequent relaying, or be read by an operator visiting the buoy.
[0014]Another system with hanged instruments is the one described in the patent document U.S. Pat. No. 3,455,159, which is a system for nautical climate and analogue data, not anchored, consisting of a surface buoy, one cable, extending from the bottom of the buoy to the target depth, one or more submersible bathimetric vehicles situated at several depths and connected to a pair of cables (electrical and mechanical, respectively). The bathimetric vehicle and the buoy are equipped to sense several environmental- and climate conditions, these being sent to the buoy by the vehicle through one of the cables, according to the requests. The non-manned buoy transmits data to stations on request.
[0015]No floating platform was found in the state-of-the-art being identical to the one according to the invention, offering stability for the whole system and it sensors, as well as the capacity to carry on the installation and inspection of the equipment, nor the ability to provide space and support for a wide range of needs for equipment or measuring instruments, which also provides the ability to carry on the maintenance of these equipments in situ, and which offers an environmental protection to the various systems.
SUMMARY OF THE INVENTION
[0016]The present invention provides a floating platform, highly stable, adequate for serving as a base to realize in situ monitoring environmental and oceanographic variables, surface and sub-surface, having the capacity for installation a wide range of equipment.
[0017]Among the considerations used for designing the platform, following can be mentioned: stability for the platform and for the measuring equipments, possibility of doing in situ equipment inspection, maintenance and, lastly, providing an environmental protection for the most critical equipment. The platform houses in its main structure a wide variety of equipment, being outside it only the equipment that need to be in contact with the ocean environment, for its proper functioning, like solar panels, lights, antennas, cameras, sensors and others.
[0018]The platform consists of a main toroidal body, which has three independent compartments; two of them are hermetic and are devoted to the installation of electrical and/or electronic equipment that must be protected from the environment. It also has a tower with an adequate platform for installing the atmospheric measurement equipment, beacon, and communication equipment for bi-directional wireless telemetric linkage.
[0019]In order to achieve a high stability against severe environmental conditions and intense waves, the platform has incorporated all the equipments inside a main structure; all these equipments installed on the base of the structure, which is semi-submerged in the body of water; the submersion is approximately 30 cm for a standard configuration of equipment. This allows the lowering of the gravity center of the assembly, thus being nearer to the buoyancy center of the platform, which is under the buoyancy center. The elongated form of the main structure in horizontal plane, and low in vertical plane, allows that the gravity- and buoyancy centers are always near each other, independently of the equipment installed in the platform that can total an extra weight of 1500 kg. The toroidal shape of the platform generates a big cross-sectional area, in the plane of water surface that allows the follow-up of the waves and the generation of low displacement of volume; these aspects contribute to the generation of stability and avoiding the tipping in intense-wave motion conditions. The bottoming of the four-mooring buoy may also help to avoid a complete upside-down tipping of the buoy, and also avoids the rolling or rotation about its main axis, caused by the ocean currents.
[0020]The platform has an electrical winch, adequate for displacing the equipment in vertical direction, within the range going from the surface down to the depth defined by the length of the installed cable. The vertical translation speed can be set according to the needs, also stopping at intervals, at pre-defined depths. This electrical winch uses an electromechanical cable passing through the center of the platform, capable of both supporting the weight of equipments at its end, and supplying them with power and communications with surface. To this cable a wide variety of equipment can be attached, the main ones can be measuring equipment, both analogue and digital.
[0021]Regarding the profiling system of the floating platform, the cable hangs from a system of pulleys within a structure that provides it with certain environmental- and theft control; from here, the cable is attached to the winch at one end, and the other end hangs vertically into the body of water. The point where the cable falls into the water body is adjacent to the gravity center of the platform, and this allows the indifferent of the cable with respect to the movements of the main structure, always maintaining a vertical axis, achieving stability in horizontal planes. To this end, the platform has adequate diameter and design for tilting with the waves without striking the measurement cable. This design allows the operation of the equipment used in places very near the water surface (0.5 m) without worrying about the equipment being struck by the main structure Lastly, the pulley has a shock absorber system for the cable, in case of relatively heavy equipment are hung from it; this system avoids sudden jerks that could be produced in the cable under certain wave conditions, enlarging the useful life of communications cable and of the components being hung from it.
[0022]In order to ease the inspection, maintenance and installation activities, and also in order to environmentally protect the equipment and systems, all components are housed in adequately protected sectors, where these sectors can be accessed relatively easily, so as to properly carry on the required activities.
[0023]As for the winch, it is installed at the base of the main structure, in order to not affect the stability of the system, in an independent sector having a specially designed access. By means of a collapsible cap, inspection and maintenance activities can be done, as well as the replacement of some elements in case of using this device for other uses. This sector offers also environmental protection to this component, because it is enclosed and is not greatly affected by the action of rains or the sea water, which are highly corrosive: the sector also protects against theft, because it will be difficult to access it by a non-authorized person.
[0024]Regarding the electrical and electronic systems, these components are isolated in another container, which keeps them safe from the ocean environment, the systems are very susceptible to failures in humid- or saline environments; it also offers protection against burglary. Inside this sector, the most heavy components are installed on the bottom, and to the walls are attached the lighter components, such as electrical panels. The access to these compartments is done with relative ease, allowing the technicians and operators carry the various operations required by the equipment.
[0025]A third compartment is devoted for installing any extra system or equipment needed in the platform; there is sufficient room for installing laboratory equipment, cold- or heat generators, hydraulic or mechanical power generators, pneumatic systems, and others that need to be installed for doing research experiments or studies, or for providing information to institutions. These equipments can be connected to the feeder and control systems aboard the platform, for their proper running.
[0026]The floating platform is power-autonomous, and is fed by an electrical power generating system based on solar panels. This energy is stored in a bank of sealed batteries, placed inside the main body. This power autonomy feeds a computerized system of small dimensions and low-consumption, among others, having a large storage- and data processing capacity which is also capable of managing the overall control of the system. This computerized system provides connectivity in several standard formats, which allow the interconnection of a wide variety of components. This allows the system to inter-relate all these components according logic or programming pre-defined by the user, which provides the capacity not only of obtaining information and data from the system, but also the possibility of actuating components installed in the floating platform, as well as outside it, because of its integration with external systems.
[0027]The on-board computing system provides compatibility for using different types and links for communication, such as radio-frequency, cellular telephony and satellite cellular telephony, among others.
[0028]The operation of each of the equipments installed on the platform can be queried and, in numerous cases, remotely configured when the user uses a graphical application.
[0029]In summary, the platform is highly stable, capable of generating and storing electrical power for its operation, obtaining data from the equipments installed over- and under the ocean surface, using an electrical winch to locate this measuring equipment at different depths, or taking samples for analysis; incorporating these data into computing models, defined by the user; storing or relaying this information through a telemetric linkage, and wirelessly integrating to other external systems, for observation as well as for actuations.
BRIEF DESCRIPTION OF THE DRAWINGS
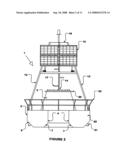
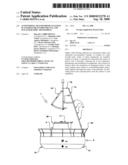
[0030]FIG. 1 shows a side view of the floating platform of the present invention.
[0031]FIG. 2 shows a front cross-sectional view of the lower part of FIG. 1, of floating platform according to the present invention.
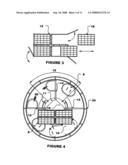
[0032]FIG. 3 shows a detail of the framework containing solar panels.
[0033]FIG. 4 shows an upper view of the platform presented in FIG. 2, according to the present invention.
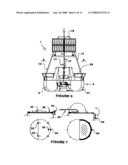
[0034]FIG. 5 shows a side view of the floating platform with a sectional view of the main platform, showing the winch inside said platform, and the coiling element containing sensors in its end.
[0035]FIG. 6 shows a front view of the floating platform with partial sectional views for showing the winch inside said platform, as well as the spring pulley device.
[0036]FIG. 7 shows the details of the top cover for the truncated-cone structure protruding from the center of main structure in the floating platform.
[0037]FIG. 8 shows several detail views for the winch and its main components.
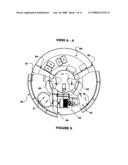
[0038]FIG. 9 is a sectional view "AA" of FIG. 6, showing visible sectors, as well as others, in partial sections, to show the interior of the floating platform according to present invention.
[0039]FIGS. 10a, 10b, and 10c show the platform with a measuring instrument to several depths.
[0040]FIGS. 10d and 10e schematically show the recovery of the measuring instrument through the top cover.
[0041]FIGS. 10f, 10g, and 10h, show the behavior of the platform and of the measuring instruments against the action of ocean waves.
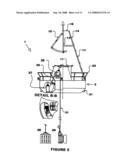
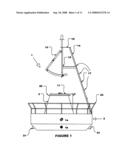
[0042]FIG. 11 shows a perspective view of the floating platform, moored in a body of water.
[0043]FIG. 12 shows a perspective front-view of the present invention.
[0044]FIG. 13 shows a perspective rear-view of the present invention.
DETAILED DESCRIPTION OF THE INVENTION
[0045]The floating platform (1) has a toroidal main structure (2), that is, there are two cylinders, an exterior one (3) and an interior one (4), closed in their upper and lower parts. The external cylinder (3) has an approximate diameter of 3 meters and a height of 0.9 meters, although these dimensions can be modified according to the application. The internal diameter (4) has a diameter of 1 meter and a height of 0.9 meter, and its dimensions can also be modified according to the application. This internal cylindrical section allows the communication, through its internal part, between the free surface and the top part, with a body having the form of a truncated cone (5) of the floating platform.
[0046]The external cylinder (3) has a chamfer (6) in its bottom part, for improving the stability against the waves and the wild conditions. The inner cylinder (4) has also a chamfer (7) in its lower part that reduces the collision with the coiling element (31) of the winch (27) against the contours of the inner cylinder (4) when there is strong wave action.
[0047]The volume of the cylindrical inner section (22) produced between the external cylinder (3) and the internal cylinder (4) is approximately 3 cubic meters, and allows the generation of the buoyancy and equilibrium needed to maintain the platform (1) on a water line, properly and stably for the whole structure and its components.
[0048]The buoyancy center (1b) and the gravity center (1a) are nearby together, one above the other, and they remain this way, depending on the quantity of equipment installed inside the main structure (2), the weight of the systems and additional components that are properly distributed, both inside or outside, can be up to 1500 kg.
[0049]This main structure (2) has inner dividing vertical panels (54), (55), and (56), that form independent compartments (51), (52), and (53) according to their application. It is possible to vary the number of compartments, adding or eliminating the dividing sections or vertical panels (54), (55) and (56), depending on the particular application. The divisions also serve to avoid the sinking of the platform in case water enters to one sector. By changing the dimensions of the main structure (2), it is possible to get more buoyancy, thus increasing the load capacity of the floating platform (1).
[0050]The floating platform (1) has three compartments (51) (52), and (53), and four main accesses, three of them (8), (9), and (10) are directly in the main body (2) of the platform, while the fourth access (11) is a part of the upper surface of the truncated conical body (5). Two of these compartments are hermetic (51) and (52), and can be accessed through a bolted cover. A third compartment (53) is devoted to the winch (27). Inside this compartment, maintenance operations can be done, as well as installation of components of this system.
[0051]The compartments can be modified according to the equipments to be installed, and to the operations to be realized. The shapes and the sizes can be modified; the internal compartments can be increased or suppressed, as well as the number of accesses to these compartments.
[0052]The access to the hermetic compartments (51) and (52) is through accesses (8) and (9), respectively, unscrewing a bolted cover; a toroidal gasket is used around the closure of the cover, which impedes the access of water to the compartment. These hermetic compartments, having approximately 0.7 cubic meters of capacity, allow the installation of different components, such as measuring equipment, electrical panels, batteries and others. The covers of the accesses (8) and (9) can be modified in shape and size, depending on the equipment and systems to be installed, as well as on the operations to be realized. The securing and access to these compartment, trough bolted covers, can be changed to a system of seizing and hinges, or another system, depending on the accessing, safety, and other needs, as deemed convenient.
[0053]Over the main structure, and near the accesses (8) and (9), with oval covers, there are retaining guides, with hooks, that serve to secure the cover when it is opened to access to the inside of the hermetic compartment. All connections to other compartments or places of the floating platform (1) from this sector are done with calibrated perforations, and also using an electrical connector that maintains the tightness of the compartment.
[0054]The third compartment (53), devoted to the winch (27), has approximately 0.7 cubic meters of capacity; it has an upper access (10), that is an oblong oval cover, secured by means of seizing and has securing detents, and has hinges that allow the opening through approximately 90°; also it has a support that allows maintaining open the cover. The cover has a section, grooved around its outline that allows the installation of a toroidal gasket for avoiding the entrance of water to the compartments; in also has handles for its opening and closing. This maneuver must be preferentially one by two individuals, although it can be done also by a single person, but with greater difficulty.
[0055]This compartment (53) is electrically connected to the compartments (51) and (52), for controlling the movements of the winch (27) and for supplying electrical power. It also has an access to the internal structure (22) of the truncated conical structure (5), because the coiling and uncoiling (31) of the winch (27) is done by an elements passing through a framework of vertical plates.
[0056]The elongated shape of the access cover (10) allows the entrance to the winch (27) in order to do the maintenance and installation of the components.
[0057]Over the main structure (2) is installed the truncated conical structure (5). This structure serves to support different components, such as the pulley-and-spring mechanism (26) for the winch (27), and profilers, tools, sensors, and electrical control elements. Also it provides environmental protection, as well as protection against theft, animals, and birds, to the different components installed inside this structure. The truncated conical structure (5) has in its upper part one access (11) which has a semicircular cover totally collapsible, because it is hinged (33) and also has seizing (34) to secure the cover, and also a handle (35) for lifting the cover. When the seizing (34) are loosened, it is possible to lower the cover and access all components protected by the structure; also, from this position it is possible the observation of the free surface.
[0058]Inside this truncated cone structure (5) it is possible the observation of the access groove to the winch compartment (27); through this groove passes the coiling component (31) being used by the winch, the groove can be seen as an elongated rectangular section (25) and (30). To this truncated conical structure (5), a 90° section take off in order to be as close as possible to the upper access (11) of this structure (5) for easing the operations done in this sector.
[0059]A rigid tripod structure, formed by two vertical smooth pillars (13) and a third pillar with bosses (14) is mounted on the main structure (2). It serves to support the mounting of a frame (15) containing the solar panels (18). Another function is to provide supporting points for the installation of communication instruments, sensors, lights, cameras and others, of all types. In its upper part there is a flat platform (19) of 0.4 square meters, on which components can be installed. This rigid tripod structure has a ladder on its third pillar (14), formed by supports or bosses (17), for allowing personnel to do inspection, maintenance and installation of components. The structure can be permanently installed, or be temporarily or permanently removed from the main structure. The assembly of the structure is done with screwed joints. Also, the structure can be modified, depending on the needed requirements.
[0060]The framework for solar panels (15) is a rigid rectangular structure, used for installing and securing the solar panels (18), permanently, and to provide a satisfactory operation and efficiency of them. In this framework, each solar panel (18) is inserted sidewards through an U-rail guide, being sled laterally to its final position; afterwards a collapsible bolted cover secures the solar panel. The framework for solar panels (18) is mounted on the tripod structure by means of pins and rigid joints, that allow the supporting the framework in its position, and also to change its orientation relative to the Sun. This way, the tilting of the framework is set according to the geographical area (latitude) where the floating platform (1) is installed.
[0061]The above is very useful in places with low insolation, because it allows the tilting of the panels at an angle that provides the most harnessing of solar radiation. The framework of solar panels can be modified, according to the type and shape of the solar panels (18), and also to the power required by the system, depending on the devices installed in the floating platform.
[0062]The floating platform (1) has a handrail around its perimeter (23), whose duty is to provide support and safety to personnel working on the platform; it also avoids the boarding of sea lions and other animals. This handrail (23) is joined to the platform by weldmets, although it also can be bolted to it. The handrail can be dismounted when necessary, or its height, shape or design can be modified.
[0063]Also, the floating platform (1) has a second handrail (20) around the upper part of the truncated cone structure (5), whose function is to provide support for displacements over the platform, as well as to provide a hooking point for ropes, chains and spring hooks, depending on the duties to do. This handrail is joined to the cone by means of weldmets, although it also can be bolted to it.
[0064]For the mooring of the floating platform, four bolt eyes (21) are used, joined in the bottom part of the main structure (2). The bolt eyes are 90° spaced from one another, relative to the main axis. This mooring system allows the minimum rotation of the main platform about its main axis. This way, the tangling of the coiling element (31) handled by the winch (27), with the mooring chains, is avoided. Another duty of this system is to provide a stable orientation of solar panels relative to the maximum insolation direction, through the decrease of the main platform's rotation; this characteristic is very useful in areas of low solar radiation.
[0065]The floating platform (1) has a winch (27) that allows the handling of several coiling elements (31), such as ropes, mechanical cables, electrical cables, electromechanical cables, hoses and others of similar type, in such a way that a wide variety of measuring instruments (28) and sensors (29) can be attached, as well as sampling systems and others.
[0066]Depending upon the application, the winch (27) can be set up for working with the equipment in the water column; this can be operated within a vertical distance according to the application used. For example, for a rope with 6.35 mm (1/4 inch) cross section, a depth of 50 m can be reached; for a rope of 12.7 mm (1/2 inch) diameter, a depth of 35 m can be reached. However, modifications can be used to the winch drum (27) in order to increase the length of the cable used, according to the type of the cable and the coiling diameter allowed by the manufacturer.
[0067]The winch (27) has a system of split axes that allows maintaining communications and providing energy, in the case of electrical cables, between the systems that are on the floating platform (1) and the systems that are submerged at the other end of the cable. In the case of electrical signals or power supply, the use of a so-called slip ring (36) can be used, similar to those marketed by IEC Corporation that can be connected to the end of one of the axes (37) of the winch. This same system of split axes can be used to connect a hose used for sampling water at different depths.
[0068]The winch drum (51) has a side cover (39), used for accessing the interior of the drum and thus being allowed to pass the cable or hose (40) to the exterior of the drum and do the necessary coupling, depending of the device used.
[0069]The winch has several sensors (38) for controlling the coiling and uncoiling movements, and also to locate the position of the instrument being handled.
[0070]For the movement of the winch, a motor (41) is used, coupled to a speed-reducing gear. Regarding the motor, it can be an electrical one, for direct- or alternating current. In case of alternating current, the use of a voltage inverter is necessary, for the conversion from direct- to alternating current. Regarding the gearbox, it can be selected according to the torque, speed and also the space availability for its mounting, depending of the system requirements. Also it is possible the use of hydraulic motors, but these would require the installation of a hydraulic equipment, plant within the floating platform.
[0071]The winch (27) has an arranger (50) for avoiding the overlapping of the cable or the hose on the turns or layers over the drum, in the coiling- and uncoiling operations. The arranger is handled by a threaded shaft (42), connected to the motor through a mechanical transmission (43).
[0072]The lateral support (44) for the winch (27) can be displaced for doing maintenance or modifications to the winch. This is done loosening the bolts (45) of the base (46), in order to displace the lateral support in the direction of the guide (47) that is at the base of the winch.
[0073]The cable or hose used with the winch (27) passes through a pulley-and-spring mechanism (26), and from there it falls vertically to the free surface, where it is submerged, depending of the application.
[0074]The function of the pulley (26) is to change the direction of the cable or hose used. The pulley is supported by a spring mechanism (48), (49), which allows dampening the jerks produced in the cable by the movements of the floating platform (1), mainly caused by the wave action. This dampening system is useful when the attached systems have a large inertia, which can generate a differential displacement between the floating platform and the system attached to the cable, which tends to generate excessive jerks in the cable.
[0075]As for the electrical and electronic equipment installed in the floating platform (1), one can differentiate between several systems and equipment whose description follows, regarding their characteristics and operation.
[0076]The electrical power generation system in the floating platform (1) is based on an arrangement of photovoltaic panels, installed on the tower of the platform, interconnected in such a way that a nominal voltage is achieved, relative to the specifications of the system's electrical components. The electrical power generated by these panels is sent to the inside of the hermetic sections, through cables arranged in a channel descending along one of the sections forming the tower, and that penetrate the body of the floating platform (1) to reach the electrical switchgear.
[0077]The power is administered by an electronic feeder, and is stored in a bank of dry 24-V dry batteries. The bank consists of 4 12-V batteries, but a larger or lesser number of batteries could be considered, depending on the total electrical requirement of the equipments installed in the platform. Each of these batteries is located inside a hermetic plastic box, with a handle for easing its installation and transport, which also protects the batteries against the environmental humidity. These boxes are installed in one of the hermetic compartments in the main body of the floating platform (1), specifically the same where the electrical switchgears are located. Each of these boxes has a female 2-pole contact in the panel, having a tightness grade IP68. Four flying male 2-pole plugs allow the connection of the batteries to the power panel through a 2-way cable 10 AWG. The required configuration for the bank of batteries is done to the inside panel with the aid of contact reglets. From these reglets the connection is made to the charge regulator and with the electrical protections and charges of the system.
[0078]The floating platform (1), in its most basic configuration, has two plastic panels having protection degree IP68 of different size, both installed inside a hermetic compartment. The main panel, which has a larger volume, is for installing the power devices, the control of charge for batteries, and the electrical protection of the system. The panel with the smaller dimensions is devoted to the installation of the system CPU, as well as the boards necessary for the operation of the on-board devices, such as the driver of the winch motor. Both panels are fixed to the inner walls of the hermetic compartment. Other boards can be specified for servicing other equipments.
[0079]The main computing system (CPU of the system) is a computing set of PC compatible architecture, designed for industrial applications, of small dimensions, low-consumption and high-performance. Initially, an Arcom Viper board is used, with an Intel processor of 400 MHz, one 64-MB RAM and RS232, USB and Ethernet ports. It also has general-purpose digital inputs and outputs. This system works with a Linux operating system, specially set up for embedded applications. Also, it is provided with an external memory type CompactFlash that allows the storage of large quantities of data and information, having backup of the relayed information, or for being used in future processing, in the incorporated calculation models. The characteristics of this processing system (such as processor speed or RAM size, for example) can be modified according to the user needs, only maintaining the basic requirements for the connectivity to the existing equipment.
[0080]This CPU is connected to the other components aboard the platform, through two methods: through serial ports/ethernet, and through a Multi I/O card, having the capacity to manage a wide range of analogue- and digital inputs/outputs. This board allows possibilities of directly receiving analogue information (analogue sensors), and also of actuating different components, both of analogue and digital nature (relays, motors, actuators, etc.
[0081]Thus, through proper applications being executed with this CPU, it is possible to handle and know the status of all the components aboard the platform.
[0082]The operation of the electrical winch in the floating platform (1) is done through sending commands by the system CPU in automatic mode, and by means of a pushbutton station in manual mode. Both operating methods are supervised by an electronic board, designed and built for this application, whose main component is a microcontroller of the family 8051. This microcontroller has the adequate program for actuating the winch motor based on the received commands, or based on the digital inputs caused by the pushbuttons. The electronic board activates the control signals to a DC motor driver, which is supplied with the nominal tension of the system (24 V DC) and handles a 40-ampere current. This driver allows fixing different operating parameters of the electrical motor, such as acceleration time, deceleration time, maximum speed to be reached, and direction of spin, among others. Regarding the electrical motor employed, it is a permanent-magnet, 24 V DC motor, fed through two 10-AWG cables. This motor, acting through a speed reducer, moves the winch drum. Three sealed magnetic sensors are used with the winch, to feed back its operating conditions: one for determining the lower limit of the cable, one for its upper limit, and a third one for counting the revolutions of the drum. The before mentioned pushbutton station consists of two NO switches that allow an operator to directly command the winch for uncoiling or coiling the cable from the outside. This pushbutton station has a tightness degree of IP68, adequate for environmental exposure.
[0083]The measuring equipment used consists of a submersible multiparameter device, capable of getting simultaneous readings of different variables, and outputting them directly through a serial port of the type RS232C. This equipment does not have an internal battery, thus it gets the power through the suspension cable that also allows the communications with surface. This measuring equipment is based on the use of an embedded board that uses one microcontroller of the family 8051, with integrated ram and flash memory; it has also several 12-bit A/D conversion channels, real-time clock and serial ports RS232C. The sensors for the several variables are supplied by various manufacturers; however, the electronic boards for signal adaptation for each particular sensor are designed and built for the application, as well as the mechanical design of the equipment.
[0084]The use of other sensors or measuring- and/or water quality analysis devices will be restricted only to those having a communication method based on a standard protocol that allows the physical connection to CPU, and to the knowledge of the commands for the setup and consultation of the equipment.
[0085]The communications device used is an RF transceiver, which can provide a transmission power up to 1 Watt. The equipment is specially programmed for receiving commands and sending messages coming from the system's CPU. The communication with the CPU is done through a serial interphase RS232C. This communication equipment allows the bi-directional communication point-to-point, or point-to-multipoint, and is located in the upper part of the floating platform (1), to have the least amount of losses of RF power in the antenna cable. The cabling to the equipment (power and data) is done through the same channeling used for the solar panel cables, up to the power switchgear, and from there to the panel where CPU is located.
[0086]Alternatives for the before mentioned communications equipment are using a GSM modem, in its SMS sending and reception mode. By means of this system it is also possible the establishment of a point-to-point connection through a system of telephone access to networks, based on conventional telephony. Analogous to this idea, it will also be possible to establish a communication of similar characteristics by the use of a satellite-communications modem, and this way the operating area will be only limited by the availability of satellite service in the area where the floating platform (1) is located. Lastly, for short distances it will also be possible the implementation of a wireless link of the type Ethernet using the proper equipment, because the CPU handles also this protocol.
[0087]Also there is the possibility of incorporating other electronic measuring elements, such as GPS systems or a weather station, being it only necessary that these devices have standard communications ports, or adaptable ports to some serial standard, for being connected directly to the main module, where the adequate routines will be programmed for consultation of the devices.
[0088]Having all the above, the floating platform (1) has enormous possibilities for realizing an environmental monitoring, through the installation of measuring or analysis equipments, connected to the system CPU, and fed by the electric power system on board there. The data obtained by these devices can be dispatched to land, through the telemetric link implemented this way, for their later processing and analysis. Also, because of the important processing capabilities available, these data will also be processed on board the platform, and be included in the decision making for control or programming of the operation of the system. These models may be complemented even with external data coming from other systems of similar characteristics, or relayed by the user.
[0089]Other application will be the commanding of external systems from a control logic implemented in the main processing module, because through the use of the wireless communications equipment it will be possible the relaying commands to equipment located at a distance, to be remotely actuated. This implementation could be done through the setting of an adequate protocol, as well as through using the corresponding communications equipment.
User Contributions:
comments("1"); ?> comment_form("1"); ?>Inventors list |
Agents list |
Assignees list |
List by place |
Classification tree browser |
Top 100 Inventors |
Top 100 Agents |
Top 100 Assignees |
Usenet FAQ Index |
Documents |
Other FAQs |
User Contributions:
Comment about this patent or add new information about this topic:
Images included with this patent application:
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
| Similar patent applications: | |
| Date | Title |
|---|---|
| 2012-03-15 | Modular floating bar with optional canopy mounts |
| 2011-05-12 | Floating platform with improved anchoring |
| 2012-11-15 | Multi-purpose suction anchor with interior access doors |
| 2012-12-13 | Submersible vehicles and methods for propelling and/or powering the same in an underwater environment |
| 2012-10-18 | Floating platform for motorized decoys |
| New patent applications in this class: | |
| Date | Title |
|---|---|
| 2019-05-16 | Carrying device and operation method thereof |
| 2019-05-16 | Offshore vessel for production and storage of petroleum products |
| 2018-01-25 | Platform device |
| 2016-04-07 | Floating support anchored on a reel comprising a guide and deflection conduit for flexible pipes within said reel |
| 2016-03-31 | Docking and drilling stations for running self-standing risers and conducting drilling, production and storage operations |
| Top Inventors for class "Ships" | |
| Rank | Inventor's name |
|---|---|
| 1 | Joop Roodenburg |
| 2 | Mehmet Nevres Ulgen |
| 3 | Rolf Rohden |
| 4 | Peter A. Mueller |
| 5 | Bruce G. Kania |