Patent application title: Methods and Apparatus for Formatting and Tracking Information for Three-Dimensional Storage Medium
Inventors:
Yair Salomon (Jerusalem, IL)
Ortal Alpert (Jerusalem, IL)
Ori Eytan (Jerusalem, IL)
Thierry Wasserman (Tel Aviv, IL)
Assignees:
Mempile Inc. c/o PHS Corporate Services, Inc.
IPC8 Class: AG11B7135FI
USPC Class:
36911203
Class name: Radiation beam modification of or by storage medium having particular optical element or particular placement thereof in radiation beam path to or from storage medium diffractive
Publication date: 2008-09-11
Patent application number: 20080219130
Inventors list |
Agents list |
Assignees list |
List by place |
Classification tree browser |
Top 100 Inventors |
Top 100 Agents |
Top 100 Assignees |
Usenet FAQ Index |
Documents |
Other FAQs |
Patent application title: Methods and Apparatus for Formatting and Tracking Information for Three-Dimensional Storage Medium
Inventors:
Ortal Alpert
Yair Salomon
Ori Eytan
Thierry Wasserman
Agents:
LOWE HAUPTMAN HAM & BERNER, LLP
Assignees:
Mempile Inc. c/o PHS Corporate Services, Inc.
Origin: ALEXANDRIA, VA US
IPC8 Class: AG11B7135FI
USPC Class:
36911203
Abstract:
A formatter for inscription of marks on to a 3D translucent optical medium
to enable recording and retrieval of information from the medium,
includes a clamping mechanism to hold the media, and at least one optical
unit calibrated to focus at least one diffraction limited spot within the
medium at a respective depth therein. At least one light source is
optimized for the inscription of marks, and at least one actuator moves
the spot relative to the medium.Claims:
1-38. (canceled)
39. A formatted optical medium having a formatting pattern including registration marks of controlled size and length for enabling data to be written to or read from a desired location in a monolithic bulk of the optical medium, said registration marks being arranged in at least one base layer; the at least one base layer being formed within a bulk of the optical medium displaced from an outer surface thereof.
40. The formatted optical medium according to claim 39, wherein, in use, the at least one base layer serves as a guide for writing data at respective data layers in the medium associated with the at least one base layer without requiring pre-formatting of said data layers.
41. The formatted optical medium according to claim 39, wherein respective registration marks are contained in multiple base layers all formed within a bulk of the optical medium displaced from an outer surface thereof, such that adjacent base layers have a known mutual separation and each base layer, in use, serves as a guide for writing data at respective multiple data layers in the medium associated with the respective base layers.
42. The formatted optical medium according to claim 39, wherein the registration marks are angularly tilted.
43. A method for writing data to a data layer of the formatted optical medium according to claim 39, said method comprising:simultaneously focusing a reading laser and a writing laser at respective focal points having a separation in a direction normal to said data layer equal to a required spacing (d4) between consecutive layers of said optical medium;guiding the reading laser so as to focus a reading spot on to a first layer and to follow a master track on said first layer; andsimultaneously guiding the writing laser so as to focus a writing spot on to said data layer separated from the reading spot by said controlled nominal separation (d4) in a direction normal to said track, and having identical locations as the reading spot in a plane of the master track;whereby a first data layer may be accurately written by tracking a base layer and each subsequent data layer may be accurately written by tracking a preceding layer, thus ensuring the correct formatting and spacing of each subsequent data layer.
44. A formatter for inscription of marks on to a monolithic 3D translucent optical medium to enable recording and retrieval of information in the medium, the formatter comprising:at least one optical unit calibrated to focus at least one diffraction limited spot within the medium at a respective depth therein displaced from an outer surface thereof,at least one light source optimized for the inscription of marks including registration marks of controlled size and length that enable data to be written to or read from a desired location in the optical medium, said registration marks being arranged in at least one base layer formed within a bulk of the optical medium displaced from an outer surface thereof displaced from an outer surface thereof,at least one actuator for moving said at least one diffraction limited spot relative to the medium, anda controller for controlling fluctuations in ambient conditions in order to attenuate formatting variations caused thereby.
45. The formatter according to claim 44, wherein the medium is disc shaped and the at least one optical unit is adapted to rotate the spot relative to the medium via rotation of the disc and motion of the optical unit.
46. The formatter according to claim 44, wherein the optical unit includes a beam splitting mechanism for splitting the beam whereby a plurality of oblong marks are inscribed simultaneously.
47. The formatter according to claim 44, wherein the optical unit is an assembly including a plurality of accurately calibrated optical units each being focused at a different depths and relative movement between the assembly and the media inscribes a multitude of tracks simultaneously.
48. The formatter according to claim 44, further including a clamping unit for holding a stack of disks in precise mutual spatial disposition, to be accessed by a multitude of optical units and actuated by a multitude of actuators.
49. The formatter according to claim 44, wherein the registration marks are angularly tilted.
50. A formatted 3D translucent monolithic optical medium having a formatting pattern that is generated by a formatter according to claim 44 so as to allow information to be recorded and read back without requiring that the medium have a physically layered structure.
51. The formatted optical medium according to claim 39, wherein discrete servo offsets in 3D or a continuous range of servo offsets in 3D, are used to obtain a 3D tracking error signal.
52. The formatted optical medium according to claim 50, wherein discrete servo offsets in 3D or a continuous range of servo offsets in 3D, are used to obtain a 3D tracking error signal.
53. The formatted optical medium according to claim 39, wherein the formatting pattern comprises zoned spirals or circles in which sectors and headers are encoded.
54. The formatted optical medium according to claim 50, having an arrangement of alternating oblong servo marks that define tracks in adjacent virtual layers such that the servo marks arrangement is equivalent to a triplet or a quadruple of servo indicators and such that the count of indicators is equal to the number of tracks intervals.
55. The formatted optical medium according to claim 39, wherein the registration marks are angularly tilted.
56. The formatted optical medium according to claim 50, wherein the registration marks are angularly tilted.
57. A tracking and formatting system for tracking data stored in a 3D formatted monolithic optical medium, said tracking and formatting system comprising:an optical unit adapted to focus at least two laser beams of possibly mutually different wavelengths at respective points in the optical medium having a controlled mutual displacement, so as to form a read spot that is used to obtain a read signal from the optical medium and a write spot that is used for recording registration marks of controlled size and length for enabling data to be written to or read from a desired location in the optical medium, said registration marks being arranged in at least one base layer formed within a bulk of the optical medium displaced from an outer surface thereof,a non-position sensitive detection unit coupled to the tracking unit and being responsive to the tracking signal generated thereby for reading data marks stored in data layers of said optical medium independent of a spatial structure of the detection unit, anda tracking unit for generating a tracking signal that conforms to the formatting pattern in said 3D formatted optical medium to enable calculation of a tracking error signal that is used as feedback for servo-mechanisms that control the precise location of a read spot according to said formatting pattern, said tracking unit being responsive to the read spot for tracking an information track in a layer that is at least partially recorded and/or servo marked.
58. The tracking and formatting system according to claim 57, further comprising:a plurality of at least partially recorded base layers having a known mutual separation; andan optical unit enabling data to be read with one wavelength and data recording with another wavelength.
59. The tracking and formatting system according to claim 58, wherein the base layers include test areas to validate that there is no over-writing of the base layers.
60. The tracking and formatting system according to claim 57, wherein the registration marks are arranged in a plurality of discrete offsets or a continuous range of radial, axial or angular offsets.
61. The tracking and formatting system according to claim 57, wherein:the formatting pattern comprises a multitude of intervals along each data track, each of said intervals having a respective type that indicates properties of the data associated with the interval.
62. The tracking and formatting system according to claim 57, wherein any variations in the fixed offset between the read and write spots is corrected by tracking error signals of the form:where:S1 and S2 are the respective signal amplitudes from the two offset mark sequences;A and B are symmetry breaking factors; andD(ES1+S2) is a general normalization factor.
63. The tracking and formatting system according to claim 57, wherein two pairs of servo offset marks are used in each axis to obtain servo indication.
64. The tracking and formatting system according to claim 63, wherein the servo offsets include servo offsets of two different magnitudes and any variations in the fixed offset between the read and write spots is corrected by a track error signal of the form:where:S1, S2, S3 and S4 are the respective signal amplitudes of the four offset mark sequences;A, B, C and D are symmetry breaking factors; andis a general normalization factor.
65. The tracking and formatting system according to claim 61, wherein said intervals include two types of intervals characterized in that they fulfill any one of the following conditions:(i) they relate respectively to user data and to servo and system information; or(ii) they have respective zoned constant linear lengths a first being dedicated mostly to user data and a second being dedicated mostly to servo and system information; or(iii) they have respective zoned constant angular lengths a first being dedicated mostly to user data and a second being dedicated mostly to servo and system information.
66. The tracking and formatting system according to claim 65, wherein the intervals have a pseudo-random variation of length.
67. The tracking and formatting system according to claim 57, wherein the formatting pattern comprises zoned spirals or circles in which sectors and headers are encoded.
68. The tracking and formatting system according to claim 57, having an arrangement of alternating registration marks that define data tracks in adjacent virtual layers such that the registration marks arrangement is equivalent to a triplet or a quadruple of servo indicators and such that the count of indicators is equal to the number of data tracks intervals.
69. The tracking and formatting system according to claim 57, wherein the formatting pattern encodes auxiliary information in addition to nominal track center.
70. The tracking and formatting system according to claim 57, being adapted for recording content in the course of the formatting process.
71. The tracking and formatting system according to claim 57, wherein the registration marks are angularly tilted.
Description:
FIELD OF THE INVENTION
[0001]The invention relates to methods and apparatus for formatting 3D storage medium and tracking.
BACKGROUND OF THE INVENTION
[0002]It has been suggested in the art, to store information in three dimensional optical storage apparatuses. One of the problems to be solved in such systems is how to read information from a particular point without letting the reading light beam being distracted by the storage medium positioned between the reading light source and the said particular point. Another problem is how to format the information stored in the medium, so as it could be written and retrieved in a consistent manner from the medium
[0003]U.S. application Ser. No. 10/240,420 corresponding to WO 01/73779 published Oct. 4, 2001 and entitled "Three-dimensional optical memory" in the name of the present assignee, suggests reading the information by two-photon absorption. In this method, the information stored in a particular point is characterized by the absorption coefficient in a certain frequency ν, and the reading is carried out with two light beams having frequencies ν1 and ν2, so that ν1+ν2=ν (ν1-ν2=ν is also possible). Only when the two light beams intersect, the light may be absorbed and reading takes place. In all the points where the two beams do not intersect, there is no light of frequency ν, and therefore no reading. The storage medium should be transparent to light having a frequency ν1, and also to light having the frequency ν2.
Formatting
[0004]Formatting a data storage medium refers to the steps after the production of blank media before it is routinely used to read and record files and to the method and special standard of this format agreed between the formatting party (a device in the factory or the independent device that is one of perhaps many doing the recording) and the end-user party--the device that routinely uses that medium. We first review the state of art in standard random access, recordable, storage devices.
[0005]In optical storage media in general and DVDs in particular, data is stored along tracks formed on one or two physical layers of the optical disc and is read by focusing a laser beam produced by semiconductor diodes on to the tracks, while spinning the disc on its axis and collecting the reflected light. The tracks usually comprise spiral tracks on which data is written and from which the data is read.
[0006]In optical WORM and rewriteable media such as DVD-R, CD-R and DVD-RAM formatting information is printed (embossed) on the information surface. On the higher level of formatting, there are, for example, more than one data formats, which enable reading and writing a WORM CD as a data or a music CD.
[0007]Another method for the formatting of 2D optical media is disclosed by U.S. Pat. No. 5,452,285 (Monen) discusses the use of uniformly distributed two dimensional array of pits may be employed interchangeably to provide timing, fine tracking and address information in an optical information storage medium. U.S. Pat. No. 4,914,645 (Getreuer) discusses a light-reflective optical disc recording system providing an accurate track crossing count and an accurate track following signal utilizing off-centered wobbled areas located in the headers of the record medium. The high frequency content of a first signal is combined with the low frequency content of a second signal, which is generated using the wobbled areas. Servo pits are provided in dedicated servo areas. Two of three pits are wobble pits and the third pit is used in clocking.
[0008]Many magnetic and magneto-optical storage devices use a formatting and tracking scheme that are referred to, as sampled servo formatting or track location modulation (track wobbling). U.S. Pat. No. 6,122,133 (Nazarian et. al.) discusses an application of sampled servo methods to magnetic storage devices, the servo signaling which is, essentially, a modulation on the 2D structure of the data within the layer, allows the following of tracks in the physical layer. In the case of said patent, the tracks are circular in nature. The nature of the formatting of the media allows the extraction both tracking information and additional track data such as sector number and zone. Said servo signals are recorded in a multi-burst pattern that allows the extraction of fractional radial track error signal and the calibrated and controlled fractional track following
[0009]In magnetic media, it is customary that higher level formatting of the device is performed at the end user location under the control of the computing system that uses the magnetic storage device. This gives the computing system a lot of space for optimizing the formatting according to the computing system unique requirements, one example is the ability to divide one magnetic hard disc into few partitions where one part is used by one Operating System (OS) and the other is used by another OS. The different parts are usually readable only by the appropriate OS. The formatting of the disc can be divided into different layers of format. The low level formatting of the disc is common to both OS in this example while the higher level formatting into an ordered file system is the part unique to each OS.
[0010]Formatting enables, among other things: [0011]an agreed upon organization of the data in the medium; [0012]finding and reading the logical and physical location of the basic data units (data blocks, sectors, block clusters); [0013]recording data in accurately documented and retrievable locations; [0014]tracking the data and tuning to a defined location where the data is stored for data retrieval, tracking (see for example U.S. Ser. No. 10/096,369 filed Mar. 13, 2002 and entitled "Method for tracking data in an optical storage medium" in the name of the present assignee), inscription of Adaptive Gain Control and synchronization headers, and more; [0015]encompassing system information in the media e.g. disc type and model, sensitivity, density of recording, manufacturing information and Individual ID and tags; [0016]a tuning the reading and or recording device parameters to the medium, e.g. changing laser power in DVD-R according to different media; [0017]encompassing file system and files at different levels of security and visibility (to the different users); [0018]using a single storage medium by different users and systems that might or might not be visible one to the other; [0019]recovering the data integrity in the medium when some sectors are damaged thus ensuring robustness and survive-ability of the data medium. [0020]recording content in the formatting process (e.g. video)
Tracking
[0021]To retrieve data correctly it is essential that the reading head can locate and follow a desired track. In practice this leads to two different kinds of tracking problem: skipping from one track to another and faithfully following a single track. For the purpose of the present discussion, it suffices to observe that these two different tracking problems require different solutions and to the extent that the method of tracking is relevant to the present invention, the present invention is concerned only with the second of the two problems.
[0022]The manner in which CD and DVD reading head track a destination track is based on focusing the reading spot on to the track and measuring the intensity of a reflected spot by position sensitive detectors. This allows calculation of the position of the reading spot and subsequent adjustment of the reading head's location based on the measured error.
[0023]US 20010040844 published Nov. 15, 2001 (Sato et al.) entitled "Tracking servo apparatus of optical information recording and reproducing apparatus" discloses a tracking servo apparatus using this technique. Thus, reflection light obtained when a laser beam is irradiated onto a recording surface of an optical disc is photoelectrically converted, thereby obtaining a photoelectric conversion signal. A tracking error signal showing an amount of deviation of an irradiating position of the laser beam for a track in a disc radial direction on the recording surface is generated by the photoelectric conversion signal. A spherical aberration occurring in an optical system is detected, a level of the tracking error signal is corrected on the basis of the detection result, and the irradiating position of the laser beam is moved in the disc radial direction in accordance with the level-corrected tracking error signal.
[0024]Likewise, U.S. Pat. No. 6,233,210 published May 15, 2001 (Schell; David L.) entitled "Optical drive error tracking method and apparatus" discloses a method and apparatus for obtaining a tracking error signal for an optical disc player which is general across the various data formats found in CD audio disks and DVDs. A photodetector having at least four active areas is used to sense the reflected laser beam. A differential amplitude tracking error signal is generated by comparing the signal strength in the different active areas.
[0025]These references are typical of known solutions for maintaining the read/write head in communication with a desired track using a photodetector having multiple sections that serves as a position-sensitive detector for detecting a component of the read/write laser beam reflected from the surface of the optical disc.
[0026]For both CDs and DVDs, axial compensation translates to a focusing adjustment of the read/write beam.
SUMMARY OF THE INVENTION
[0027]The invention is applicable to any homogenous optical storage medium in which any voxel/point within determined, constrained three dimensional space can be accessed. Thus, for example, the optical medium may be a disc rotating around its center or a cube that can be linearly actuated in 3D. In particular the invention is aimed at the formatting of a 3D optical storage medium, referred to simply as an optical medium or disc, such as described in Applicant's co-pending U.S. application Ser. No. 10/240,420 corresponding to WO 01/3779 published Oct. 4, 2001 and entitled "Three-dimensional optical memory". WO 01/73779 describes an optical disc manufactured from a single monolithic piece of clear translucent polymer. In the specific embodiments described therein, information is stored within the disc by the writing of hundreds of stacked virtual layers of data. Functionally and spatially, each of these layers can be compared to a single CD or magneto-optic information layer where information is stored on spiral or circular tracks that are divided into annular zones and sectors, each of which is labeled using a respective header inscribed at a controlled and retrievable location (e.g. at the beginning) of the sector. According to these embodiments, the relative motion between the reading spot and the data track is achieved by rotation of the disc and axial and radial movement of the diffraction limited spot. An opto-mechanical assembly that is capable of focusing a diffraction limited spot in such media is disclosed in co-pending U.S. Ser. No. 60/416,274 filed Oct. 7, 2002 entitled "Method and system for tight focusing of optical reading or recording beam inside monolithic storage material" co-owned by the present assignee and included herein by reference.
[0028]It is assumed that, as the optical medium moves relative to the read spot, the track suffers a limited amount of run-out. In the case where the storage medium is a disc, the run-out is in both r (radial run-out) and z (axial run-out) directions. Such distortions can occur in the event that the axis of rotation is slightly off the disc center and slightly non-parallel to the disc plane normal, such that the data track moves relative to the reading spot while the disc rotates.
[0029]It is a first object of the invention to enable formatting of the optical medium so that data can be recorded thereon at any desired/pre-defined location or track in 3D space without confining the data to a physically layered structure.
[0030]It is a second object of the invention to provide a mechanism for tracking data stored in the 3D optical medium after is has been formatted in order to allow data to be retrieved from and optionally recorded to and the optical medium.
[0031]According to a first aspect of the invention, there is provided a formatter for inscription of marks on to a 3D translucent optical medium to enable recording and retrieval of information from the medium, the formatter comprising:
[0032]a clamping mechanism to hold the media,
[0033]at least one optical unit calibrated to focus at least one diffraction limited spot within the medium at a respective depth therein,
[0034]at least one light source optimized for the inscription of marks, and
[0035]at least one actuator for moving said at least one spot relative to the medium.
[0036]According to a second aspect of the invention, there is provided a tracking and formatting system for tracking data stored in a 3D formatted optical medium, said tracking and formatting system comprising:
[0037]a tracking unit for generating a tracking signal that conforms to the formatting pattern in said 3D formatted optical medium to enable calculation of a tracking error signal that is used as feedback for servomechanisms that control the precise location of a read spot according to said formatting pattern; and
[0038]a detection unit coupled to the tracking unit and being responsive to the tracking signal generated thereby for reading data signals stored in said optical medium independent of a spatial structure of the detection unit.
[0039]The invention is particularly directed to the formatting and tracking of a 3D optical medium that enables the use of a single photodetector to consistently retrieve (i.e. track and decode) information stored in the medium.
[0040]Any active medium known in the art that is suitable for 3D optical storage is suitable for use according to the present invention. Non-limiting examples of active media are described in above-mentioned U.S. Ser. No. 10/240,420 as well as in U.S. Pat. No. 5,268,862 (Rentzepis) issued Dec. 7, 1999 and entitled "Three-dimensional optical memory", both of which are incorporated herein by reference, stillbene derivatives, and azobenzene derivatives.
[0041]It must be clear that though, the embodiments described below are in particular concerned with disc shaped media, the formatting and tracking methods described are not limited to disc shaped media and apply to any shape of media and track of information (e.g. helical shaped tracks).
[0042]With regard to the second aspect of the invention, the tracking and formatting may be achieved using different approaches. Thus, in accordance with a first approach, a number of base-layers are inscribed inside the disc. The "factory" pre-formatted base-layers are written at a very high level of accuracy. In such an embodiment, the optical medium is formatted with a formatting pattern that includes registration marks arranged in base layers having a known mutual separation for enabling data to be written to or read from a desired location in the optical medium. Both the reading and writing lasers are focused simultaneously with a vertical distance between focal points equal to the required layer spacing. Each new consecutive layer is written while reading and tracking a layer before it, thus ensuring the correct formatting and spacing of each new layer.
[0043]According to the first approach for achieving the formatting and tracking, the tracking and formatting system comprises an optical unit adapted to focus at least two laser beams of possibly mutually different wavelengths at respective points in the optical medium having a controlled mutual displacement, so as to form a read spot that is used to obtain a read signal from the optical medium and a write spot that is used for recording marks in the optical medium; and
[0044]the tracking unit is responsive to the read spot for tracking an information track in a layer that is at least partially recorded so as to allow the write spot to record data in an adjacent layer of the optical medium.
[0045]It will be appreciated that the preferred implementation of the first approach described in the detailed description is non-limiting and parameters, such as the distance between layers, the number of base layers, the implied number of layers between base layer and any other parameters may be varied without departing from the scope of the invention as defined by the claims.
[0046]In one embodiment of the tracking unit the writing laser is kept at a fixed focal distance while the reading laser is wobbled around the previous layer so as to ensure tracking using conical scanning. This method of tracking is disclosed in U.S. patent application Ser. No. 10/096,369 and WO 03/077240 published filed Sep. 18, 2003 (namely after the priority date of this application) in the name of the present assignee. Other tracking mechanisms are possible e.g. a three spot mechanism for radial tracking and an autofocus mechanism that are known in the art. Such tracking methods rely on the use of a position sensitive detector and are known per se. One example of such multi-photo-detector methods for 3D optical storage is described in "Multi-layer Optical Data Storage Based on Two-photon Recordable Fluorescent Disk Media", by Haichuan Zhang et al., Proceedings of the Eighteenth IEEE sym. on Mass Storage Systems, Apr. 17-20, 2001. Another tracking method is based on the second approach discussed below.
[0047]According to a second approach for achieving the formatting and tracking, the tracking and formatting system comprises an optical unit adapted to focus at least two laser beams of possibly mutually different wavelengths at respective points in the optical medium having a controlled mutual displacement, so as to form a read spot that is used to obtain a read signal from the optical medium and a write spot that is used for recording marks in the optical medium; and
[0048]the tracking unit is responsive to the read spot for tracking an information track in a layer that is at least partially recorded so as to allow the write spot to record data in the optical medium.
[0049]The manner of operation of such a formatting and tracking system may be explained by a simplified 2D example relating to a single linear track represented by a line divided into data intervals and servo intervals. A servo system is synchronized to the data and servo intervals, e.g. by a special sync word that points the end of the data interval, in the servo interval first appears a leading mark, slightly offset to the first side on the track, and, at a delay that is resolvable by the system, a second following/trailing servo mark that is slightly offset to the other side of the track. The system compares the amplitude of signal from said two marks and produces an error signal that is proportional (linearly or non-linearly) to the difference between the two amplitudes.
[0050]To accommodate for a known and calibrated offset between the read spot and write spot a biased fractional track error signal is generated. A first method for calculating a biased error signal as function of two sets of sampled servo bursts that are symmetrically offset is by adding symmetry breaking factors to the error signal calculation that take into account the linear or non-linear spatial nature of the signal from a servo mark as a function of the distance from the read spot and the respective shapes of the mark and spot.
[0051]A first order formula of the track error signal is of the form:
( A S 1 - S 2 ) - B D ( E S 1 + S 2 )
where: [0052]S1 and S2 are the respective signal amplitudes from the two offset mark sequences; [0053]A and B are symmetry breaking factors; and [0054]D(ES1+S2) is a general normalization factor.
[0055]A second family of methods to accommodate for a known offset between the read and write spot is based on the use of higher density servo signals where in the case of the simplified 2D example, the higher density is in the off-track axis, servo marks can be offset at a multitude of discrete or continuous offsets and the various servo signals are identified by special encoding or by their timing. The higher density servo marks are used to acquire a tracking error signal in a manner similar to two offsets signaling by choosing an appropriate pair of offset servo sequences, symmetry breaking of the tracking error signal can be applied here as well. The use of composite sets of offset servo marks enables a wider lock-in range and extraction of higher order tracking error signal.
[0056]FIG. 9 depicts the results of using a symmetric second order signal, wherein four servo mark sequences are recorded in two pairs of opposite track offsets +X +Y, -X and -Y (|Y|>|X|), respectively. Thus, the servo offsets include servo offsets of two different magnitudes and any variations in the fixed offset between the read and write spots is corrected by a track error signal of the form:
A ( B S 1 - S 2 ) + C ( D S 3 - S 4 ) I ( E ( S 1 + F S 2 ) + G ( S 1 + H S 2 ) )
where: [0057]S1, S2, S3 and S4 are the respective signal amplitudes of the four offset mark sequences; [0058]A, B, C and D are symmetry breaking factors; and [0059]I(E(S1+FS2)+G(S1+HS2)) is a general normalization factor.
[0060]The resulting track error signal enables locking on to a fixed offset between the read and write spots which may be required if there is an offset between the read and write spots as is the case depicted in FIG. 9 where the offset is around half track pitch. It should also be noted that in the specific embodiments, the second order track error signal allows a wider range of lock in. Symmetry breaking second order track error signals can also be extracted in this family of second order signals. With hybrid use of these methods it is possible to dynamically choose the best method for the current read spot--write spot offset and the current read spot--track offset. Non-linearity can be incorporated or eliminated according to the required track error signal by appropriate manipulation of the signals from the differently offset servo marks.
[0061]In its broadest application, the invention provides the formatting freedom to define the recording of data anywhere in a 3D optical medium, without constraining the data to lie in pre-defined layers and without constraining the servo marks to lie in a specific orientation. This is rendered possible by the use of homogenous optical storage medium in which any voxel/point within determined, constrained three dimensional space can be accessed. In a more limited application of the sampled servo technique, there are added along the servo interval, axial tracking marks that are slightly offset above and below the track. The axial tracking error is extracted in parallel to the radial tracking information.
[0062]Using a servo signaling frequency, that is higher than the response frequencies of the mechanical subsystem, allows the use of low pass filtering of the sampled servo signals and suppression of noise in these signals.
[0063]The isolated track example considered above is used only for the clarification of the ideas behind the second tracking method. In practice, track pitch should be minimized to crowd as much data as is possible in one layer. One of the methods known in the art of servo signaling is known under the name of `alternating servo`. In this scheme, the roles of the leading and following marks alternate between one coil and another of the track spiral or the concentric data circles. Embodiments in 3D are described below with particular reference to FIG. 6b of the drawings.
[0064]According to this embodiment, the tracking and formatting system further includes an error correction unit for correcting tracking errors of a reading spot focused on to a nominal track in the optical medium, said error correction unit comprising:
[0065]a feedback unit for receiving from the servo modulation marks signals having respective amplitudes which vary according to respective servo offset magnitudes from a nominal track center or different respective angular tilts relative to a nominal track axis or any combination thereof;
[0066]an offset determination unit coupled to the feedback unit and responsive to the received signals for determining a direction and relative amplitude of a respective, fractional offset of the read spot from the track in radial and axial directions; and
[0067]a spot adjustment unit responsively coupled to the offset determination unit for adjusting a location of the reading spot accordingly.
[0068]A second family of embodiments of the second formatting and tracking method is based on manipulation of the beam profile by manipulation of some of the optical elements in the optical unit that controls the focus and location of the light beams. In one related example of such manipulations as used in reflective optical media devices and sometimes known as `optical super-resolution`, a non-transmitting ring obscures part of the objective to create a tighter spot. This is an example of a manipulation that is aimed at changing the beam profile in a specific plane, namely the focal plane, and does not change the symmetry of the beam profile, while servo sampling methods are required to extract directional information and therefore require a less symmetrical beam profile. Having beam profiles that are oriented diagonally to the optical axis enables the creation of marks that are diagonally oriented, this being a unique feature of media that has three dimensional nature. FIG. 12 illustrates pictorially the use of oriented marks for the navigation of the spot in the radial direction. A specific embodiment of a manipulation that creates a tilted mark is the addition of a liquid crystal panel that blocks approximately two thirds of one half of the clear aperture of the optical unit focusing the recording beam. In FIG. 11 the track is drawn from a tangential view (track going into the page). The two partially overlapping ellipses indicate the two orientations of servo marks that are tilted relative to this track. If the reading spot 1110 drifts along one of two diagonal directions, along the orientation of the marks, then the signal from one servo marks sequence become weaker much faster than the signal from the other servo marks sequence. The information is not complete, as it does not indicate in which direction along the mark was the relative movement of the spot. The missing information is added by either adding servo marks that have other deformations or by combining these methods with other tracking methods, such as those of the first family of the second approach for achieving the tracking and formatting. An embodiment of tracking with complete information is illustrated in FIG. 10, where an additional pair of servo marks is used (1030, 1040), that are tilted in the tangential direction. These marks enable derivation of an error signal in the axial direction, substantially having every servo mark play the role of two axial i.e. non-tilted servo marks of the first family of the second approach to formatting and tracking, thus completing the information. The use of the tangentially tilted marks has the benefit of one simple scheme for all servo marks but requires more accurate timing of the sampling of the tangentially tilted mark to ensure that comparison is indeed between the first part of the mark that is below (or above) the track and the second part that is on the other side. Methods for creating tilted beam profiles are discussed in the detailed description of the invention and include partial, asymmetrical, obscuration of the objective or the creation of aberrations e.g. comma aberrations by tilting one of the optical elements.
[0069]It will be understood that the preferred implementations of the second approach described in the detailed description are also non-limiting and the sampled servo signaling may or may not have dedicated track intervals. If the sampled servo has dedicated intervals, these intervals can be of constant linear length, of constant angular length or even of varying lengths. A continuous data sequence may be recorded using continuous servo information from adjacent servo tracks in the radial and axial directions. The servo signaling marks can additionally be encoded by varying the location or density of the marks, either by varying the location along the track or by varying the offset from the track. Coding may also be achieved by varying the lengths and by varying the amplitudes of the signals emanated by the read process from these marks, e.g. by varying the amplitude or duration of the write pulse that inscribes these servo marks. Servo signal marks can also be of varying sizes. Different servo patterns can then be differentiated by any distinctive characteristics and by any distinctive signal processing method, be it in the time domain, the frequency domain (different servo marks having different frequency content) or a hybrid method (e.g. a wavelet domain filtering). One of the embodiments described below in the detailed description relates to a case where the servo marks are larger than the minimal mark size of the system, which in turn affects the packing of information tracks. Efficient packing of the tracks can, for example, be achieved by the use of circular tracks and the use of servo marks in alternating inscription. The alternating servo marks can be used either only in radial or axial directions, or in both. All these additional variations of sampled servo marks allow improved extraction of the tracking error signal from the sampled servo marks and the encoding of additional information by these marks. Non-limiting examples of such additional information encoding is the encoding of sector or layer identity or the encoding of system information such as disc version and production batch.
[0070]The formatter is very similar for both formatting methods. The formatter is composed of a very stable spindle that holds the disc with a very strong clamping mechanism, a highly stable optical unit (OPU) that is capable of focusing to the diffraction limit at different depths at a high level of repeatability which is located over the disc and a very stable actuator fixed to the OPU and capable of locating the OPU at different radial locations allowing either the continuous inscription of a spiral of sample servo marks or the discontinuous inscription of sampled servo marks in circles.
[0071]3D storage that is based on non-linear phenomena such as described in WO 01/3779 and references cited thereby is capable of using short pulses having low energy and high peak powers for the inscription of marks within the medium. Thus the formatter may leverage the use of short pulse lasers (relatively low energy, high peak powers) for the inscription of a plurality of marks simultaneously, with one pulse. A diffractive element (usually set before the focusing element) may be used to split the focused beam into a fixed or changing pattern of marks. This pattern can be a part of a servo-sync pattern or a full servo-sync pattern and can also be more than one part or more than one complete servo-sync pattern recorded in parallel. As noted, the marks recorded in the formatting process are not limited to servo and sync patterns and can also have other functionalities. An example a suitable laser is a Titanium-Sapphire laser which also exhibits a pulsing frequency that is much higher than the required servo marking frequency. In a specific embodiment a Titanium-Sapphire laser (or any other appropriate laser) is switched between a plurality of synchronized formatters.
[0072]In another embodiment the apparent redundancy between the laser and the servo frequency is leveraged by fast modulation of beam focus location, e.g. using an electro-optic modulator, by slight modulation of the beam orientation a slight shift in the focus location can be achieved, thus recording a plurality of patterns in parallel. The apparent redundancy can also be used to record content.
[0073]In another embodiment of the formatter the single beam OPU is replaced by a multi-beam OPU. Non-limiting examples of methods to create an OPU with a multitude of beams include the use of a number of simple optical units in parallel, the use of a hybrid lens or a grating, or the use of a diode laser array. Optical fibers or free space propagation may be used to direct one or many light sources to the focusing elements, using any combination of beam splitters, switches, mirrors and/or fiber bundles. Any method known in the art to create a multitude of beams of satisfactory quality is applicable. The multitude of beams can be used to either inscribe one layer after the other (serial inscription) or a few layers in parallel. The details of such embodiment are described below.
[0074]It is yet a further object of the invention to satisfy other formatting requirements such as creating sector, zone and layer header information, synchronization information and auxiliary information as may be required by a user of the optical medium. The use of zoned spirals may result in different servo encoding such as zoned constant angular (or linear) velocity, which would respectively imply zoned constant angular (or linear) servo marking. The servo rate may also be pseudo-randomly varied for different reasons.
[0075]In addition, in one embodiment the optical medium is designed to be a double sided disc having tracks on opposite sides of the middle of the disc that are mutually counter-rotating having a mirror chirality. In this context, it is to be noted that chirality is a term borrowed from chemistry and at its most simple means "handedness"--that is, the existence of left/right opposition. For example, a person's left hand and right hand are mirror images and therefore "chiral." It is important that the tracks on opposite sides of the disc do not overlap so that when the reading mechanism reads one side it cannot inadvertently access the tracks on the other side. This may be achieved by leaving a volume between the two central layers empty of data thus ensuring no mistaken intrusion by the reading head into that half of the disc that is made to rotate in the opposite direction. The chirality of the two sided disk is manifested in both the formatting and recording process and in the reading process and is both spatial and temporal chirality. The chirality while formatting can be solved simply by formatting one side at a time.
[0076]The spatial chirality while formatting spirals can also be controlled by having the linear stages formatting on one side going from the inner to the outer radius of the disk and the linear stages on the other side going in the other direction. The temporal chirality can be controlled by appropriate reversal of the servo marking order.
[0077]The frequency response of the tracking mechanism must be high enough to be able to respond to changes of the relative location of the track and the spot, at the expense of the implied decrease in the information capacity of the track inherent in the increased number of servo marks. If the tracking information frequency is much higher than the required feedback frequencies, low pass techniques can be used to increase the feedback signal quality.
[0078]Locking on to a track can be achieved by the extension of methods known in the art for locking on to a one or two layered medium, e.g. a slow and controlled modulation of the location of the spot that gradually allows the tracking error signal to take control over the servo loop.
BRIEF DESCRIPTION OF THE DRAWINGS
[0079]In order to understand the invention and to see how it may be carried out in practice, specific embodiments will now be described, by way of non-limiting example only, with reference to the accompanying drawings, in which:
[0080]FIG. 1 is a schematic representation of a formatter using only a single spot;
[0081]FIGS. 2a and 2b are schematic representations showing respectively side and top views of a formatter that uses a plurality of spots;
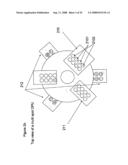
[0082]FIG. 2c is a schematic representation of an optical unit for splitting the spots into many focal points;
[0083]FIG. 2d is a schematic representation of coordinated spherical aberration correction for a multitude of focusing elements;
[0084]FIG. 2e is an illustration of a multi-arm formatter capable of formatting a plurality of disks simultaneously;
[0085]FIG. 3 is a side view showing the location of base layers according to a first formatting method;
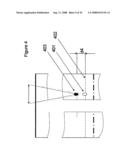
[0086]FIG. 4 shows tracking and recording of a new layer according to a first approach;
[0087]FIG. 5a is a schematic representation of a sampled servo for a single track;
[0088]FIG. 5b is a schematic representation showing a group of adjacent tracks with alternating sampled servo;
[0089]FIG. 6a is a schematic representation showing a 3D sampled servo of a single track according to a first family of a second approach;
[0090]FIGS. 6b and 6c show details of possible embodiments of sampled servo in 3D storage that use a small number of sampled servo marks;
[0091]FIG. 7 is a schematic representation of sampled servo using servo marks that are larger than the data marks;
[0092]FIGS. 8a, 8b and 8c show schematically side, tangential and top projections respectively of a patch from a three dimensional space that contains both data tracks and alternating sample servo marks, the alternating sample servo marks are larger that the data marks;
[0093]FIG. 9 is a graphical representation showing a tracking error signal as a function of deviation from a nominal track center;
[0094]FIG. 10 is a schematic representation showing a 3D sampled servo of a single track according to a second family of the second approach;
[0095]FIG. 11 shows a projection along the tangential axis of the 3D sampled servo shown in FIG. 10;
[0096]FIG. 12 is a schematic representation showing the equivalence between marks tilted along the tangential axis and two axially offset marks;
[0097]FIG. 13 is a schematic representation showing an interleaved track having data sections separated by servo sections; and
[0098]FIGS. 14 to 16 show graphically the effect of obscuration on the spot profile.
DETAILED DESCRIPTION OF EXEMPLARY EMBODIMENTS
[0099]Referring to FIG. 1 there is shown functionally a formatting system 100 for a 3-D optical storage medium 101. The formatting system 100 comprises a rotary shaft 102 driven by an appropriate driving motor (not shown) for rotating the optical storage medium 101 set thereon, and an optical head 103 for writing information on to or reading information from one of the tracks in the optical storage medium 101. In the specific embodiment, the optical unit 103 comprises a semiconductor laser, laser driving circuits and an optical system creating a focused spot. In one embodiment of the invention reduced to practice, these components may be realized by off-the-shelf components and so are not shown is the figure. The location of the spot is controlled by actuator 104.
[0100]FIGS. 2a and 2b show schematically side and plan views of an optical unit for splitting the spots into many focal points so as attain a multi-spot formatter. A multi-spot optical unit 201 creates a multitude of spots, enabling the simultaneous inscription of a number layers, making formatting faster and thus less costly. To this end, the optical unit 201 may contain multiple objective lenses as shown in FIG. 2b, which operate as a splitting mechanism through each of which, light sources are focused on to a spot or a number of spots in the disc. 210 and 211 show schematically two different possible arrangements of focusing elements. Each focusing element can be pre-designed to be corrected for a limited depth range in the disk; in this case a single focusing lens might suffice. In another embodiment each focusing element can be used for the formatting of a larger depth range within the disk, in this case the focusing element is comprised of more than one simple optical element. The focusing elements are required to be coordinated. In a first embodiment this is achieved by very accurate actuation of each and every lens in the system in a coordinated fashion. The coordination may achieved by the recording of a calibration pattern in a test disk or test area in the formatted disk and sequential focusing of the calibrated focusing elements to the calibration pattern. Once calibrated, the focusing elements are rigidly locked to move in coordination. In a second embodiment main and auxiliary lenses as described in U.S. Ser. No. 60/416,274 are injection molded to form two elements, or otherwise are rigidly attached to two elements. In either case, the two elements are then actuated so as to move the whole focusing system in coordination. FIG. 2b also shows how to accommodate a multitude of linear stages above and below the disk so as to gain more light beams focused into the disk and faster and less expensive formatting.
[0101]It should be noted that in the case where more than two focusing spots are arranged in a tangential direction (210), different pairs of focusing elements (e.g. 2101 and 2102) create tracks of different densities. This may be incorporated into a design where different layers have different densities.
[0102]FIG. 2d is a schematic representation of another embodiment for the coordinated spherical aberration correction for a multitude of focusing elements. The spherical aberration correction is achieved through one relatively large optical correction element that is common to a number of focusing elements and will be referred to henceforth as "Spherical Aberration Correction Common Optical Element" or SACCOE for short. The requirement is to perfectly focus the beam (to diffraction limit) and to correct all aberrations. This requirement is separated into a first part, handled by a first optical element, which is used mostly for spherical aberration correction and a second part, handled by other elements of the optical system, which is responsible, mostly, for focusing and the correction of other aberrations such as coma. In the specific embodiments the SACCOE is an optical element that comprises a slab of varying thickness of optical material that has the same refractive index as the medium. The working principle of the SACCOE is that once the focusing element is spherical aberration corrected for a specific depth, it is possible to prevent spherical aberration by keeping the optical path length through optical material (with the refractive index the media) constant. A first embodiment of the SACCOE employs two prisms 240, 241 that may have optical oil 242 therebetween. The prisms may be either linear or circular as portrayed in a general scheme 250. The SACCOE 251, in this case a circular two prism element, is located in between the medium 252 and a set of focusing elements 253. The main constraint is that the surfaces of the SACCOE be sufficiently parallel, relative to the surface of the medium at the beams' incidence, so as to minimize other types of aberrations. A limited amount of aberration can be compensated for by other parts of the focusing system. The volume in between the prism does not have to be filled with oil, if it is small enough, and the resulting aberrations can be corrected for by slight tilting of the SACCOE parallel surfaces.
[0103]A second embodiment of the SACCOE, shown in cross-section, 243 is by the use of a variable amount of optical oil 244 in between two parallel glass surfaces 245 and 246. In the specific embodiment shown in the figure, the glass surfaces are kept parallel by a set of actuators, designated schematically by 247. The optical oil is pressurized to prevent non-homogeneities. The pressurizing elements and oil reservoirs are schematically shown as an annular flexible material 248. The distance between the SACCOE and the disk should be kept small to prevent aberrations.
[0104]FIG. 2c is a schematic representation of an optical unit for splitting the spots into many focal points through a single objective lens.
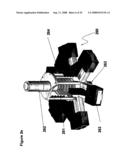
[0105]FIG. 2e shows schematically a multi-arm formatter 260 capable of simultaneously formatting a stack disks in precise mutual spatial disposition, to be accessed by a multitude of optical units and actuated by multiple actuators. The disks are mounted on a pin 261 shown schematically in FIG. 2f that is set between two air spindles 262. Each of the linear stages 263 carries a respective bracket 264 built of a plurality of arms, which are installed one on top of the other, and each one of which may carry a unit of joint focusing elements (not shown). To format the disks from two sides the linear stages go in and out in the same manner as the one disk formatter linear stages do; each linear stage has arms that either belong to the group going above the disk or to the group coming below the disk.
[0106]FIG. 2f shows the mounting of the multiple disks and the operation of the spindle pin (265). The spindle pin is dismounted from the machine by a simple procedure. The disks 266 are loaded on the spindle pin outside the formatter. The vertical position of each of the disks is determined by spacer rings 267 that assure the disks' location relative to the machine within a very tight tolerance (possibly a few microns). Securing each of the disks to the spacer rings is carried out by springs 268.
[0107]FIG. 3 is a side view showing the location of base layers according to a first formatting method and depicts the actual format of the disc used thereby. FIG. 3a shows a slice through the 3D optical disc, the indications in FIG. 3a designated by (b) and (c) indicating the zooming in the respective sub-figures. FIG. 3b illustrates the structure of the formatted disc in the few hundred microns adjacent to the surface of the disc 201. In the specific embodiment, the distance between the surface of the disc 201 and the first base layer denoted by d1 is 100 micron and the distance between consecutive base layers denoted by d2 is 160 micron. FIG. 3c illustrates the structure of the formatted disc by looking at the center of the disc. The distance, in the center of the disc, between the first spiral base layer of the first half of the disc and its counter rotating pair is denoted by d3. In the embodiment shown in the figure, d3 is 40 microns and the total disc thickness is 6 mm. In a preferred embodiment the base layers include test areas to validate that there is no over-writing of the base layers.
[0108]FIG. 4 shows schematically tracking and writing a new layer to a formatted disc according to a first approach The optical unit that is modeled as a focusing lens, for the sake of explanation only, focuses two beams of different wavelengths at different depths of the disc, separated by a distance d4. The reading spot 401 tracks a spiral that is already inscribed at a certain depth in a layer whose plane is indicated by a dashed line 402, this spiral track serving as a master. At the same time, a writing spot 403 inscribes a new spiral separated by d4 from the reading spot in the vertical direction, but having the same location along the other axes as its the master.
[0109]FIGS. 5a and 5b are schematic representations showing a simplified 2D view of the sampled servo technique of a second formatting method. FIG. 5a illustrates the method of extracting tracking error signal from a single track. The location of the track that is allocated for data is indicated by dashed intervals and dotted intervals indicate the locations allocated for the servo marks. Servo marks, that are the marks inscribed at the formatting step, are offset to the nominal track location, so that as the reading spot passes along the nominal track a tracking signal is collected from the servo marks. The signal is proportional, linearly or non-linearly to the overlap between the read spot and the servo marks. If the reading spot is exactly centered on the nominal track location, then the overlap with the servo marks offset to the sides of the tracks is the same and the difference between the signal obtained from a sequence of servo marks is zero. If the reading spot is nominally offset to the track, then the filtered signal from a first sequence of marks will be different from the signal from the second sequence of marks, located on the other side of the track and this difference will serve as tracking error signal, indicating the direction in which the reading spot should be moved.
[0110]FIG. 5b illustrates the use of alternating servo in the simplified 2D scheme on a patch of ten tracks t1, . . . , t10. The direction of reading spot scan is from left to right along the page, the servo marks of the odd numbered tracks having the left indicating servo marks first and the right indicating servo marks second, the latter marks serving as left indicating marks for the even numbered tracks, thus changing the order between the left indicating and right indicating signals.
[0111]FIG. 6a is a schematic representation showing a 3D sampled servo of a single track according to a first family of a second approach. The track is defined by servo marks that reside at dedicated intervals, the servo marks being offset to the nominal track 600 in both radial and vertical directions. In the embodiment shown in the figure, the radially offset marks 601 and 602 precede the axially offset marks 603 and 604.
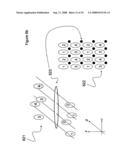
[0112]FIG. 6b describes an alternating servo embodiment of two pairs of sampled servos that are used to give the sampled servo indications but by the use of the alternating scheme the servo count of servo marks is only one servo mark recorded for each servo interval (neglecting edge effects). In the figure 621 is a schematic perspective of the tracks (depicted as lines) and of the servo marks (depicted as ellipsoids). The servo marks define a virtual layer in which the tracks are to be recorded, the servo marks designated by numerals 1 and 2 being below the layer and servo marks designated by numerals 3 and 4 being above it The virtual layer is shown encircled and is designated by 623. This virtual layer is also depicted in 622, which is a schematic view showing several virtual layers of the same servo scheme taken along the tracks which are thus depicted as dots with the servo marks shown as ellipsoids as before. It is clear from the schematic view 622 that the servo marks have alternating functionality; those serving as indicators above the track for the odd numbered virtual layers serve as indicators below the track for the even numbered virtual layers.
[0113]FIG. 6c shows how a more complicated alternating scheme is used to increase the disk capacity and reduce the number of required servo marks. It is clear from 631 that the servo count is one servo mark for each track interval (again, neglecting edge effects). Note how staggered servo marks are used for the tracking. This is elaborated by 632 which is a perspective view of the virtual layer shown encircled and designated by 633 in scheme 631 and the respective servo marks. The servo marks designated by numerals 1 and 2 are directly below the track (1 preceding 2 along the tangential axis) while the marks designated by 3 and 4 are above the tracks and in between the respective tracks. It is clear from 631 that the roles are switched for layers of the complementing oddity with respect to layer 633. In other words, if the virtual layers are numbered sequentially, then those servo marks that are in between tracks in odd layers are directly above tracks in even layers; and those servo marks that are in between tracks in even layers are directly above tracks in odd layers. This gives rise to an arrangement of staggered servo marks that define tracks in adjacent virtual layers such that each track is bound by triplets of servo marks such that two servo marks straddle the track in one layer and the third servo mark is aligned with the track in an adjacent layer. The data capacity is increased because the distance between the tracks in alternating layers is increased, without changing the inter track distance and the inter layer distance (as defined by the servo marks), consequently reducing possible inter-symbol interference. This is another manifestation of the advantages of the combination of sampled servo and true 3D storage medium.
[0114]The alternating servo schemes shown in FIGS. 6b and 6c have been described for the specific embodiment of sampled servo that is arranged in intervals. It should be clear that this specific embodiment does not limit the use of such alternating servo arrangements, with the exemplified servo count, and that these arrangements can be applied equivalently to a number of repetitions per intervals, a number of offsets, continuous servo or any embodiment that is implied from the description of the invention. Thus, it will be understood that the invention contemplates any arrangement of alternating servo marks that define tracks in adjacent virtual layers such that the servo marks arrangement is equivalent to a triplet or a quadruple of servo indicators and such that the count of indicators is equal to the number of tracks intervals.
[0115]FIG. 7 is a schematic representation of sampled servo using servo marks that are larger than the data marks. To attain higher density, the data marks determine the track pitch and therefore the servo marks cannot be packed in the simple alternating method. Trying to use simple alternating servo would mean that the servo marks are substantially located on the nominal track and slight offset of the read spot would not bring a substantial change in the signal from such marks. To accommodate for such constraint, the servo marks of different tracks are located differently along the servo interval. The tracks are divided into four groups denoted a, b, c and d that recur periodically one after the other, each track having a specific delay between the end of the data interval and the occurrence of the servo marks, thus averting the problem of overlap associated with the simple alternating servo marks.
[0116]FIGS. 8a, 8b and 8c show corresponding side, tangential and top projections respectively in a 3D optical storage medium. FIG. 8a is a side view of the patch of tracks, emphasizing the illustrated four layers, the temporal/spatial order between the servo marks in different layers. The relative locations of the servo marks and their alternating character is better illustrated in the tangential view, FIG. 8b. The axial servo mark sequences, e.g., 810 are in between the track layers, e.g., 820 and 830 and the radial servo sequences are in the plane of the data, e.g., 840, in the plane of 850 and 860. The alternating character of the servo marks should be noted whereby in between two tracks in both axial and radial directions there is only one sequence of servo marks that serves as a common track indicator for each adjacent data track. The temporal delays between the different servo marks that allow the separation of the different signals may be seen in FIG. 8c.
[0117]In FIGS. 8a, 8b and 8c, the tracks and servo marks are drawn substantially to scale. Each ellipsoid designates the size of a mark, whose size should be less than 2 micron diameter in the tangential and radial directions and less than 10 microns in the axial direction. In the specific embodiment shown in the figures, the marks are of diameter of 1 micron in the radial and tangential directions and 6 microns in the axial direction. Many methods for encoding data in the data interval are known in the art and therefore are not illustrated in the drawings. The over-simplified encoding of information by the data marks is plain binary encoding where the two states of the encoding/decoding are defined by the appearance of a mark in a certain location. Other much more efficient encoding scheme are known. It should also be noted, that the servo marks can be arranged as headers and servo bursts. Many sync methods indicating the end of one interval and the start of the next, either servo or data intervals, are known in the art and therefore are not illustrated in the drawings.
[0118]The distance between layers is 10 microns, the distance between tracks is 2 microns and the minimal distance between marks along the track is less than 2 microns. The reading spot in the specific embodiment has a diameter of 1.5 microns.
[0119]FIG. 9 is a graphical representation showing a tracking error signal as a function of deviation from a nominal track center, characteristic of different formatting and tracking systems. The first S-curve 901 (dashed blue line) is calculated for a pair of sampled servo mark sequences that are evenly offset to the nominal track The S-curve represents the symmetric difference S1-S2. The second S-curve is calculated using a second order formula of the form:
A ( B S 1 - S 2 ) + C ( D S 3 - S 4 ) I ( E ( S 1 + F S 2 ) + G ( S 1 + H S 2 ) )
where: [0120]S1, S2, S3 and S4 are the respective signal amplitudes of the four offset mark sequences; [0121]A, B, C and D are symmetry breaking factors; and [0122]I(E(S1+FS2)+G(S1+HS2)) is a general normalization factor.
[0123]FIG. 13 is a schematic representation showing an interleaved track having data sections separated by servo sections.
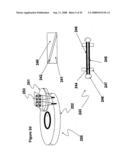
[0124]Considering the second family of servo marks of the second method of formatting and tracking, the formatting and tracking mechanism is described in more detail. With reference to the embodiments shown in FIGS. 10-12 and summarized in FIG. 10, the servo interval has four types of marks, a pair of radially tilted marks in the radial-axial plane 1010, 1020 and a pair of marks tilted in the tangential-axial plane, 1030, 1040.
[0125]To extract the servo error signal, each of the signals from each servo mark sequence is phase locked on to and low pass filtered. Two tracking error signals are calculated. The first is the difference between the signals derived from the two radial marks, which gives an indication along one of the tilted orientation. This is elaborated in FIG. 11 showing a view of a projection of the marks tilted in the radial-axial plane 1010, 1020, the view being from the track axis. The read spot 1110 is viewed from this direction as well. If the read spot is off-axis as in FIG. 11, then-the signal from mark 1020 is substantially higher than the signal from mark 1010. Note that if the spot is inverted as indicated by 1111 the signal is equal, and in this case a second indication is required to remove ambiguity.
[0126]The second signal indicating the direction of the offset of the read spot, below or above the nominal track, is extracted from the tangentially tilted tracks. Each mark is sampled twice at successive times t1 and t2 and the respective signals (after phase lock and low pass filtering) are designated S1t1, S1t2, S2t1 and S2t2. The formula for calculating the direction of the offset is given by (S1t1+S2t2)-(S1t2+S2t1).
[0127]Note that in principle there is need only for one tangentially tilted mark but the averaging of the response from the two oppositely tilted marks reduces noise, mostly jitter noise. It should also be noted that owing to the aberrated character of the tilted spots they are not diffraction limited. The sampling rate should be high enough to yield samples from the different areas of the tangentially tilted marks.
[0128]FIG. 12 illustrates pictorially the use of oriented marks for the navigation of the spot in the radial direction. A specific embodiment of a manipulation that creates a tilted mark is the addition of a liquid crystal panel that blocks approximately two thirds of one half of the clear aperture of the optical unit focusing the recording beam.
[0129]In the preferred embodiment, tilted beam profiles are created by partial, asymmetrical, obscuration of the objective or the creation of aberrations e.g. comma aberrations, by tilting one of the optical elements. Consider in more detail the beam profiles as calculated by an evaluation of 2D integral over the aperture area for each field point. This integral is a mathematical manifestation of Huygens principle that considers every point on a wave front as source of waves. In our case, the field in the aperture has constant magnitude (well overfilled) and phase that fit concentric spheres centered in the lens focal point (this is a definition of an aberration-less lens). The 2D integration is performed for each point in the focal zone r, z grid point (axial symmetry avoids the need to use 3D grid in the focal zone). (Reference may be made to Goodman, Joseph W., "Introduction to Fourier Optics" 1968).
[0130]In order to consider the results of the calculation, FIGS. 14, 15 and 16 are sets of figures each containing three diagrams showing the creation of asymmetrical beam profiles (shown in FIGS. 15 and 16) from a symmetrical beam profiles (shown in FIG. 14). FIGS. 14a-c show the objective and beam profile of a non-obscured objective and should be viewed in comparison to the next sets of figures.
[0131]FIG. 14a shows the non-obscured objective lens. FIG. 14b shows the resulting beam profile in the radial plane of the focus. Note that it is a tight symmetrical focus, less than 1.5 microns in diameter. FIG. 14c shows the beam profile in a slicing plane along the optical axis (z). Note that the focus is also tight and symmetric, less than 5 microns in depth.
[0132]FIG. 15 is a first example of asymmetric obscuration of the objective. FIG. 15a shows the geometric nature of the obscuration. FIG. 15b shows that the profile of the spot in the focal plane, has not changed substantially, with only minor degradation. FIG. 15c shows a significant change in the profile along the optical axis. It is clearly manifested that there is a significant change of signal from the volumes denoted by 1510 and 1520.
[0133]FIGS. 16a-c show another example of another obscuration of the objective that gives an even more extreme tilt of the beam profile and of the mark created by the respective spot. It should be noted that the asymmetric beam shaping techniques can be applied either in recording marks or reading, or in both.
[0134]Whilst the invention has been described with particular regard to a formatting and tracking system for use with a 3-D optical storage medium wherein data is stored as voxels written in the bulk of the material, it will be understood that the principles of the invention are equally applicable to other kinds of 3D technologies where a need of geometrical indications arise or to non-optical or hybrid storage media.
User Contributions:
comments("1"); ?> comment_form("1"); ?>Inventors list |
Agents list |
Assignees list |
List by place |
Classification tree browser |
Top 100 Inventors |
Top 100 Agents |
Top 100 Assignees |
Usenet FAQ Index |
Documents |
Other FAQs |
User Contributions:
Comment about this patent or add new information about this topic:
Images included with this patent application:
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
 |  |
| New patent applications in this class: | |
| Date | Title |
|---|---|
| 2015-12-31 | Optical disc information device and information processing device |
| 2013-10-24 | Data storage and retrieval |
| 2013-09-05 | Objective lens for optical pickup device, optical pickup device, and optical information recording/reproducing device |
| 2013-05-02 | Optical pickup and optical read/write apparatus |
| 2013-04-11 | Optical read/write apparatus |
| New patent applications from these inventors: | |
| Date | Title |
|---|---|
| 2022-09-22 | Chimney and flange design for camera module |
| 2022-07-07 | Glareshield |
| 2022-01-06 | Systems and methods for flange focal length distribution |
| 2016-03-24 | Roofing |
| 2015-01-08 | Light collection system and method |
| Top Inventors for class "Dynamic information storage or retrieval" | |
| Rank | Inventor's name |
|---|---|
| 1 | Koji Takazawa |
| 2 | Hideo Ando |
| 3 | Seiji Morita |
| 4 | Yoshiaki Komma |
| 5 | Motoshi Ito |